pic.programmer
Advanced Member level 3

- Joined
- Aug 19, 2015
- Messages
- 773
- Helped
- 141
- Reputation
- 284
- Reaction score
- 140
- Trophy points
- 43
- Activity points
- 7,531
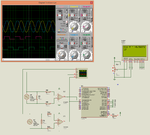
If I substitute 7 for the variable count and do the calculation then it shows exact result but I don't know why it is failing in getting the proper value for the count variable. Am I doing something wrong with Proteus ? The Proteus Oscilloscope shows that the difference between the 1st signals ZC and 2nd signals ZC is 7 ms and for 7 ms there should be 7 x 4 = 28 (250 us) timer interrupts but all the time it is showing 11 or 12.