romel_emperado
Advanced Member level 2

- Joined
- Jul 23, 2009
- Messages
- 606
- Helped
- 45
- Reputation
- 132
- Reaction score
- 65
- Trophy points
- 1,318
- Location
- philippines
- Activity points
- 6,061
So are you still in the software design stage or are you going to implement it with hardware?
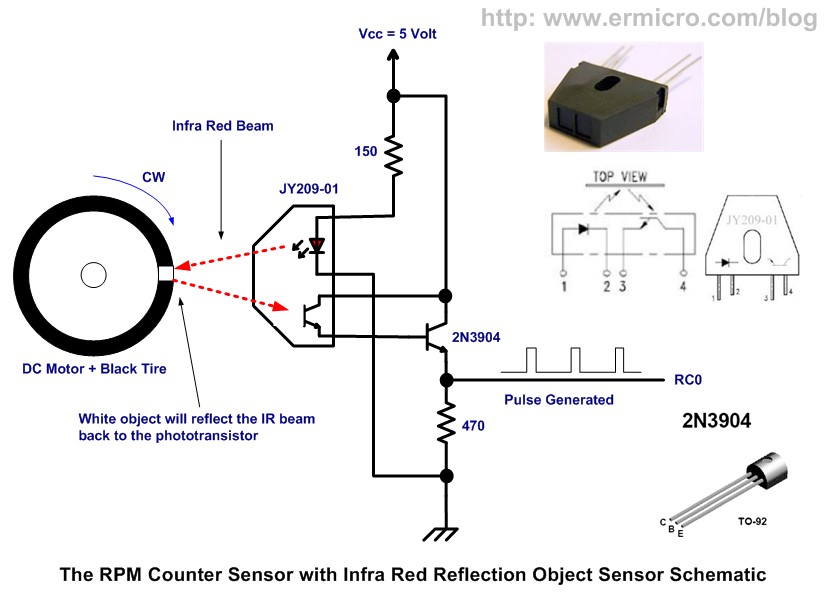
If you are going to construct your design, have you decided on your sensor type?
IR sensor is nice but I will check first what is available in my market. I will going to implement this in hardware. next of this I will study eagle cad software how to design a small PCB for this project. but not for now because tomorrow I will study my FPGA subject
do you have suggestion of the hardware to be use? thanks.
by the way, the minimum RPM I can measure is 0.5Hz I think... I dont know the formula.. hihi
") and how to get the maximum? hehe
and how to get the maximum? hehe