yefj
Advanced Member level 5

- Joined
- Sep 12, 2019
- Messages
- 1,540
- Helped
- 1
- Reputation
- 2
- Reaction score
- 5
- Trophy points
- 38
- Activity points
- 9,275
Follow along with the video below to see how to install our site as a web app on your home screen.
Note: This feature may not be available in some browsers.

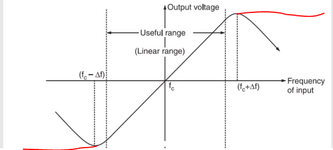
freq_up=[9516.89,9517.6,9517.69,9517.81,9517.83,9517.86,9517.9,9518,9518.05,9518.07,9518.1,9518.13,9518.18,9518.33,9518.45,9518.68,9519.01,9520.3]
error_up=[40,47,52,31,26,13,3,-0.4,-3.7,-8.3,-13.5,-25,-39,-35,-30,-24,-18,-1]
plot(freq_up,error_up)
xlabel('frequency [MHz]')
ylabel('error signal mixer phase detevtor[mV]')