bhl777
Full Member level 6

Hi All,
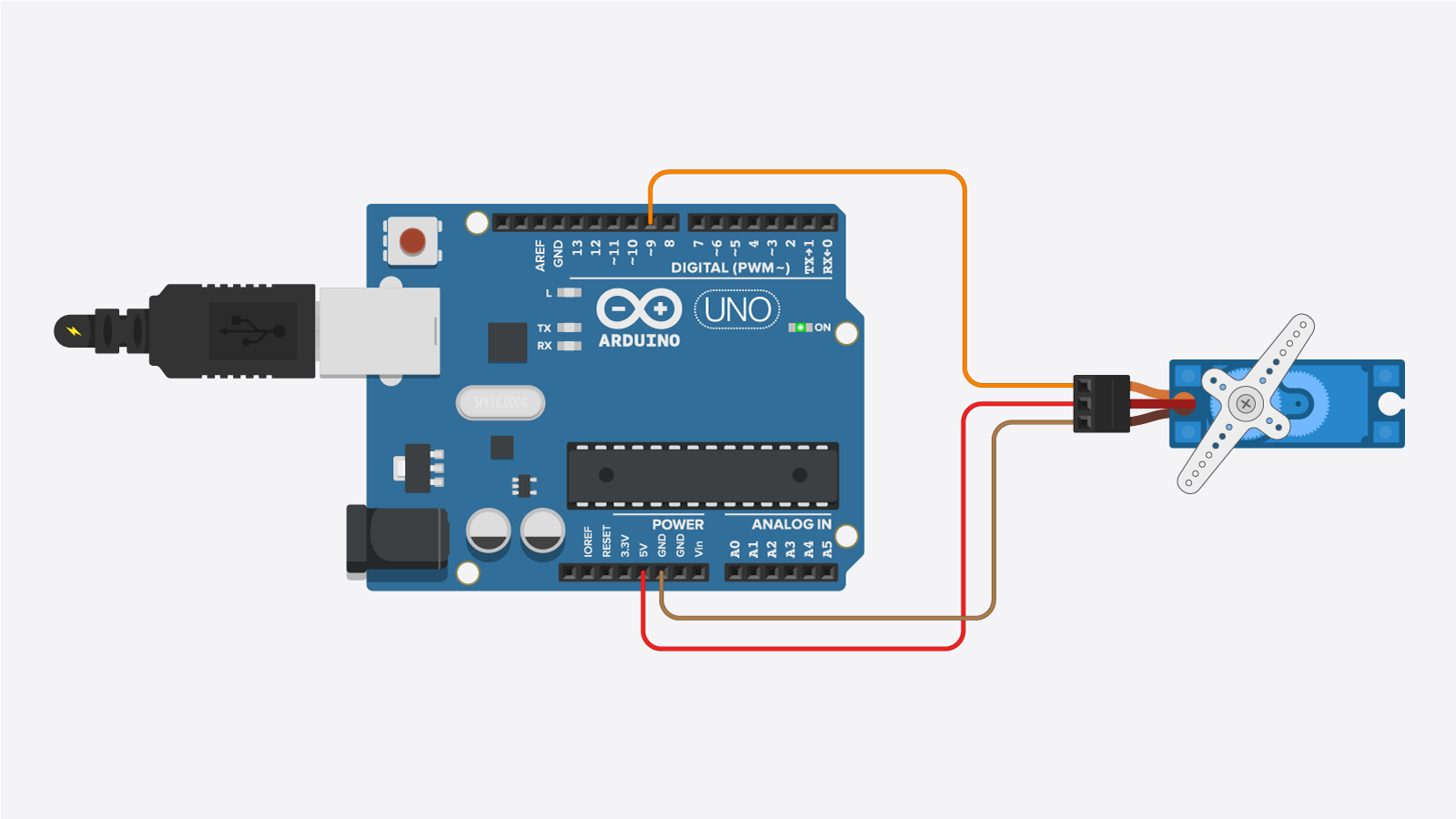
I am trying to implement a knob-controlled step/dir mechanism to drive the motor using Arduino and any necessary circuits.
This is what I have and what I want to achieve. Would anyone give me some suggestions on what can be done using the MCU and/or any necessary external circuits? Any suggestions or useful online examples are highly appreciated.
Thank you!

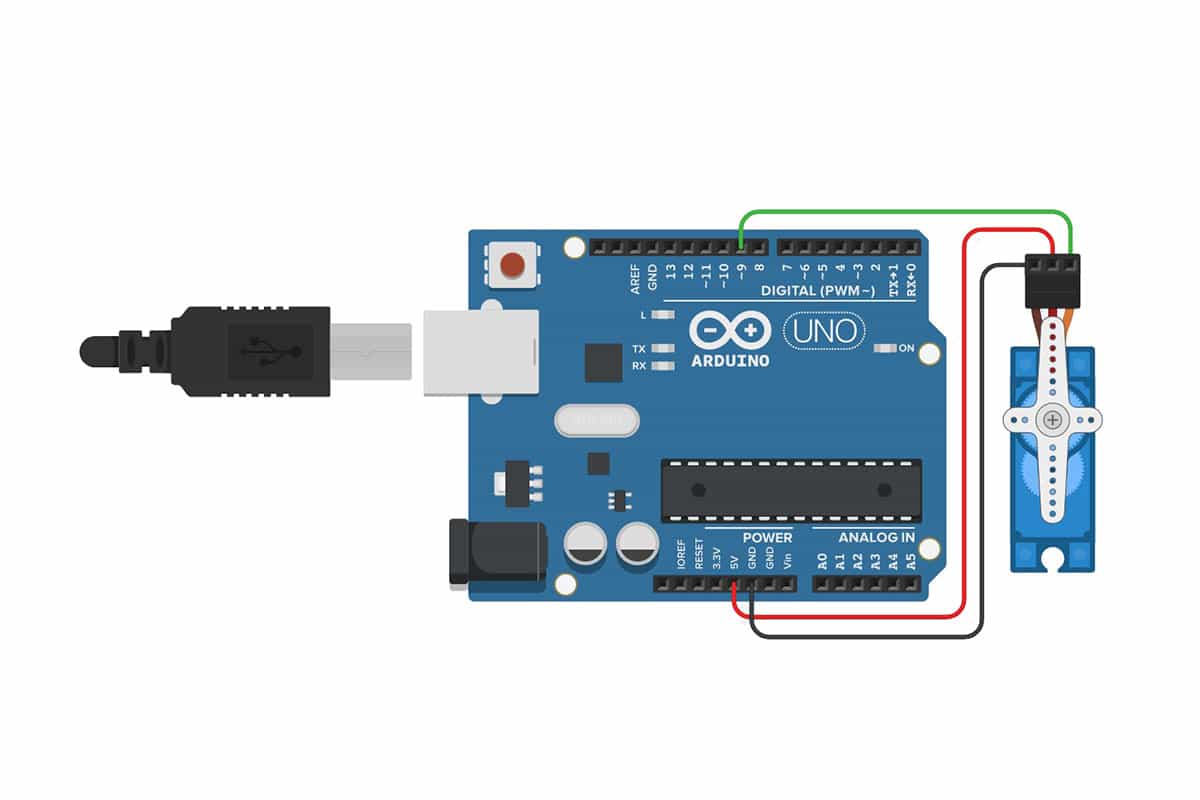
I am trying to implement a knob-controlled step/dir mechanism to drive the motor using Arduino and any necessary circuits.
This is what I have and what I want to achieve. Would anyone give me some suggestions on what can be done using the MCU and/or any necessary external circuits? Any suggestions or useful online examples are highly appreciated.
Thank you!