Patrick_66
Member level 3

Hello everyone,
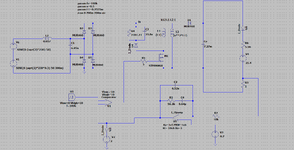
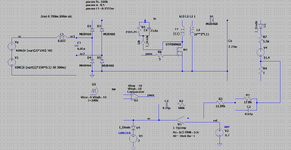
Currently I'm trying to simulate an LED driver with flyback configuration in DCM mode.
The output current is around 0.7A with 18W output power.
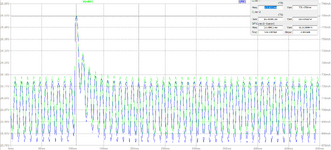
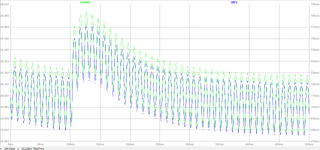
The problem that I'm currently facing is that the time to reach steady state is higher when using a type 3 compensator compared to a type two compensator. Wanted to know whether this is normal or wrong because if not mistaken using type 3 compensator is better for the overall performance of the system.
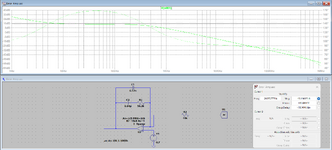
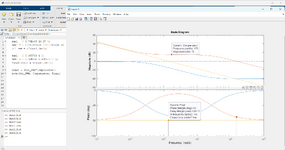
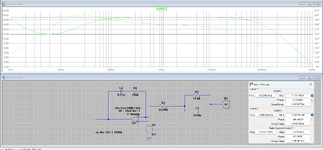
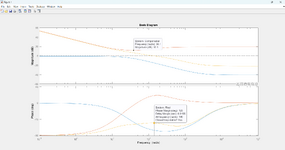
The system has a phase margin of 90 degrees when using a type 2 compensator whereas the phase margin is around 125 degrees when using a type 3 compensator and both having the same cross-over frequency. The figure of the circuit and simulation is shown below.
Hope that you can enlighten me and correct my mistake.
Thank you in advance for the help.




Currently I'm trying to simulate an LED driver with flyback configuration in DCM mode.
The output current is around 0.7A with 18W output power.
The problem that I'm currently facing is that the time to reach steady state is higher when using a type 3 compensator compared to a type two compensator. Wanted to know whether this is normal or wrong because if not mistaken using type 3 compensator is better for the overall performance of the system.
The system has a phase margin of 90 degrees when using a type 2 compensator whereas the phase margin is around 125 degrees when using a type 3 compensator and both having the same cross-over frequency. The figure of the circuit and simulation is shown below.
Hope that you can enlighten me and correct my mistake.
Thank you in advance for the help.