Vermes
Advanced Member level 4


Theoretical assumptions
- the boat speed should be about 1-2m/s
- it must be waterproof (to prevent electronic flooding by waves)
- after falling over by a wave, it should swim further
- it must have a light signalization easily visible from 150m (to see it at night)
- it must be unsinkable
- it should have a finding system in case of loosing control or an accident
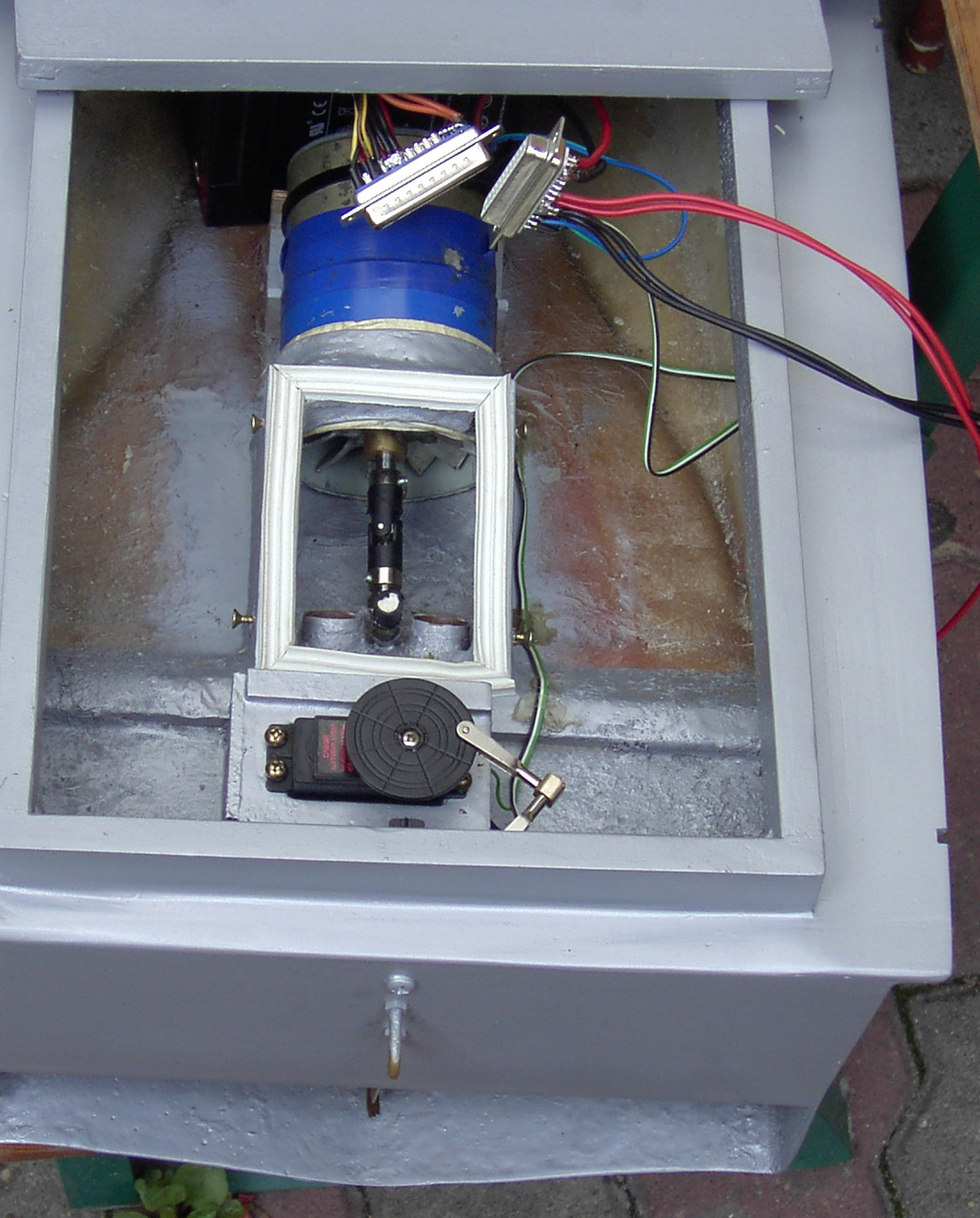
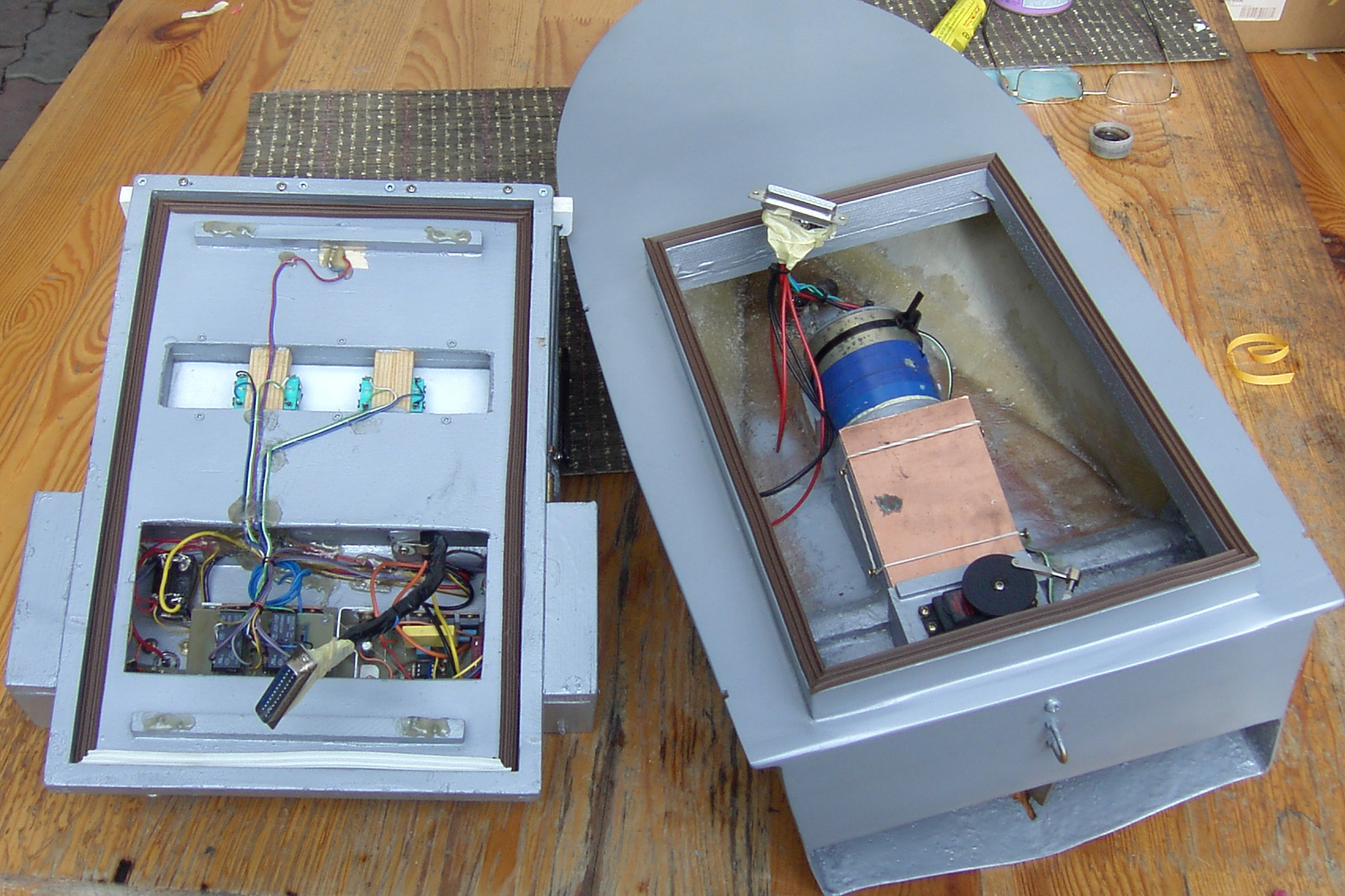
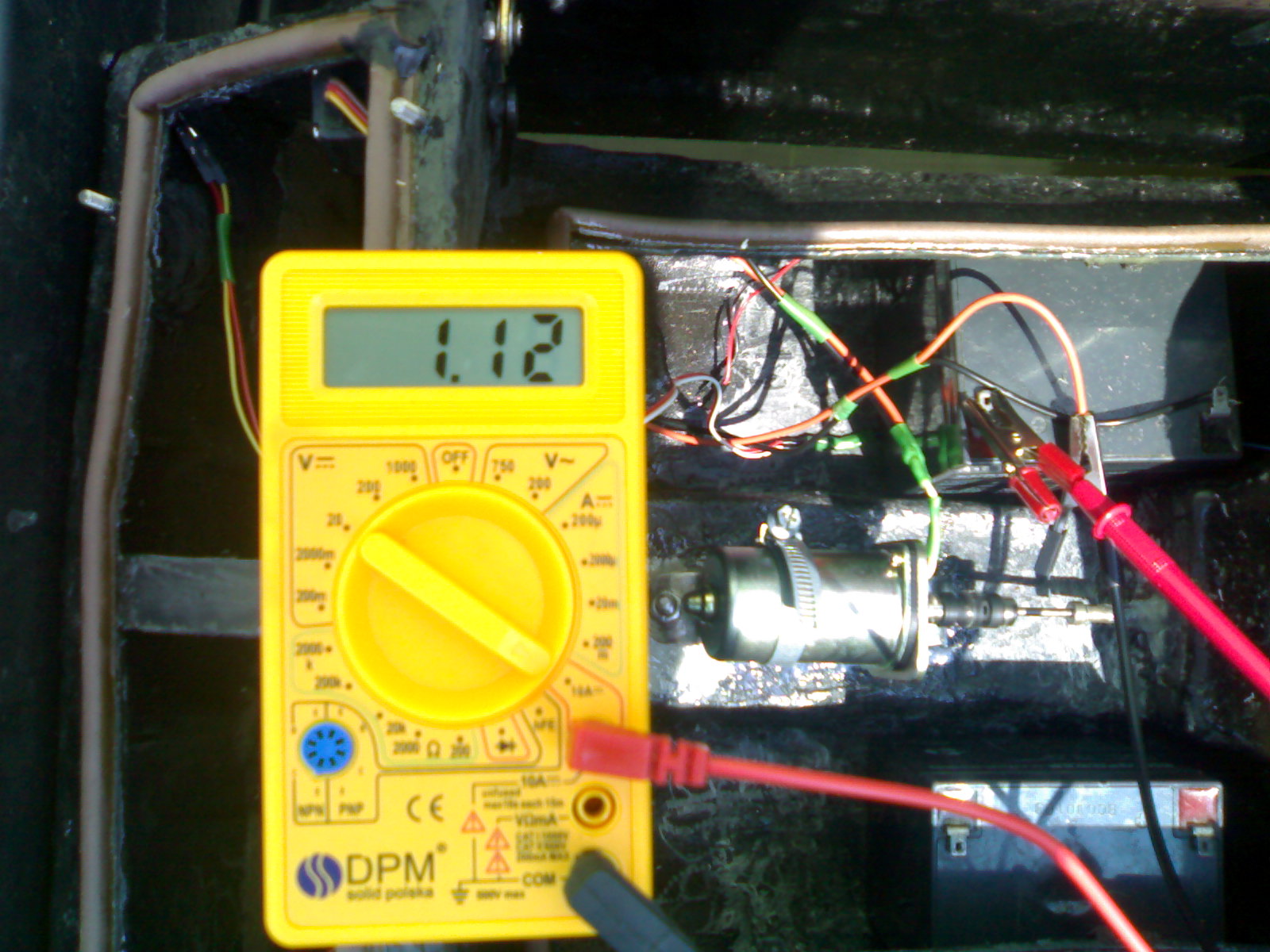
The motor from the blower of Fiat 126p was used (35W/12V)
Cooling system(for the motor):
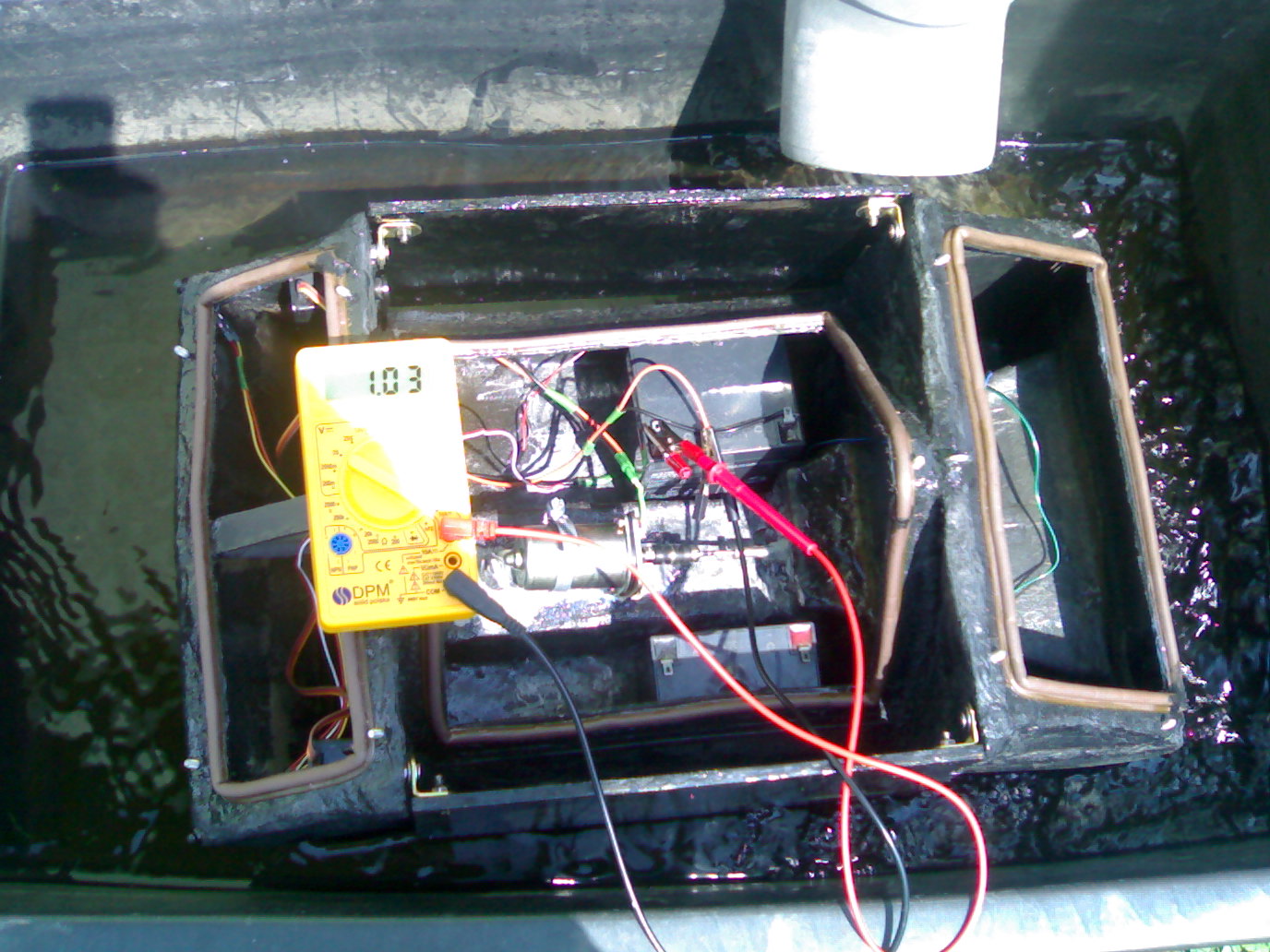
After some changes of the motor (loosening the brush pressure, sawing the compression spring of the rotor), the motor on 12V takes about 1,1-1,3A – it needs 13,2W to work .
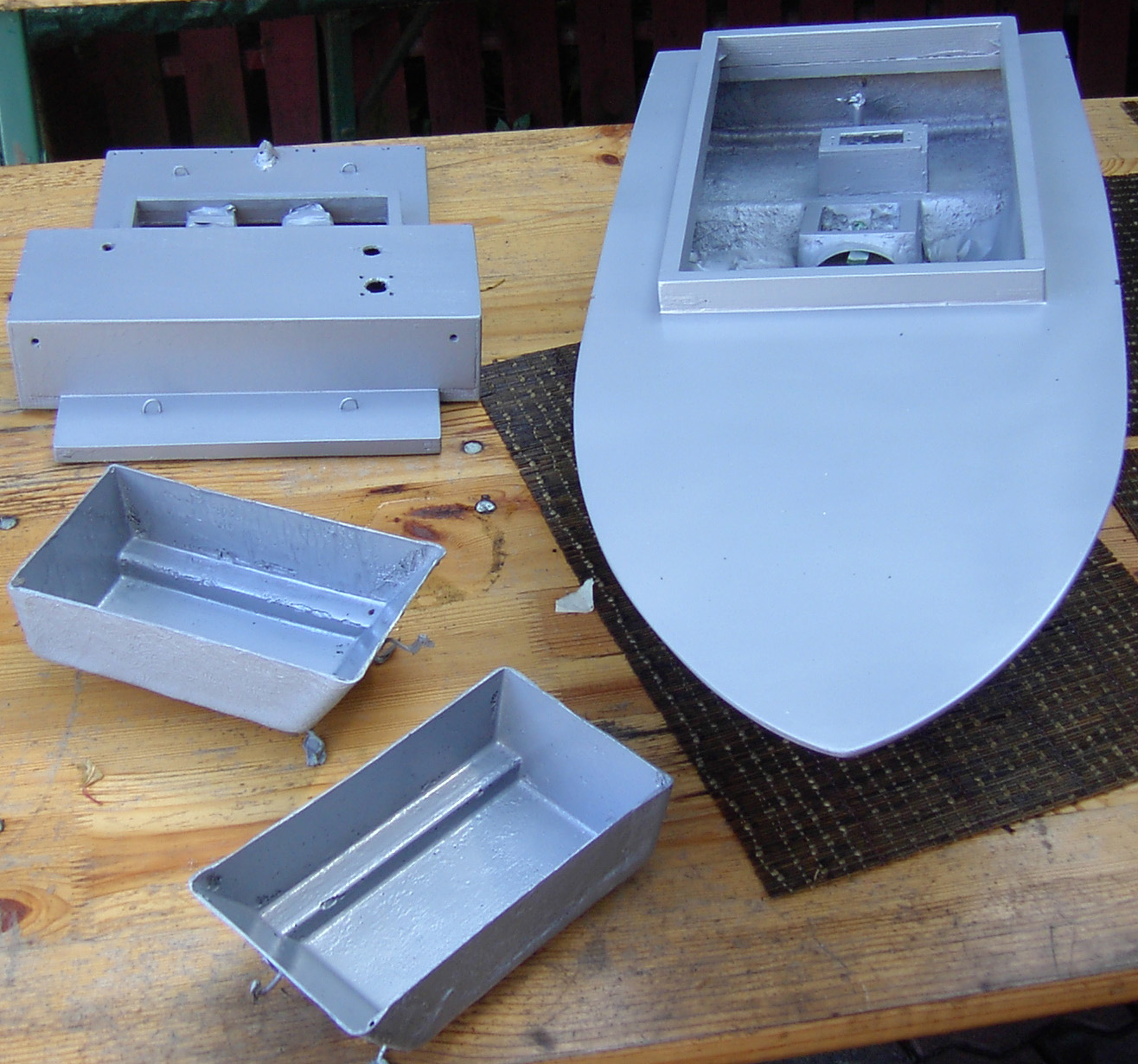
The body:
The body was build of a “Mercury” boat body (cut 1/3 from stern). A new stern was built, and the bottom was paved with a 2mm layer of resin mat. On the bottom, a cooler was mounted. The pipe was build of copper.
The construction started from cutting two tubes of copper from the CO installation. The inlets and outlets are 90 and 120 degrees. The pipes are filled with pieces of wash pots wires to improve heat exchange. All this installation was pasted onto the resin to the bottom of the boat.
The sealing system is based on double sealing tape for sealing window frames. In the end, the whole boat was painted with coating for car rimps.
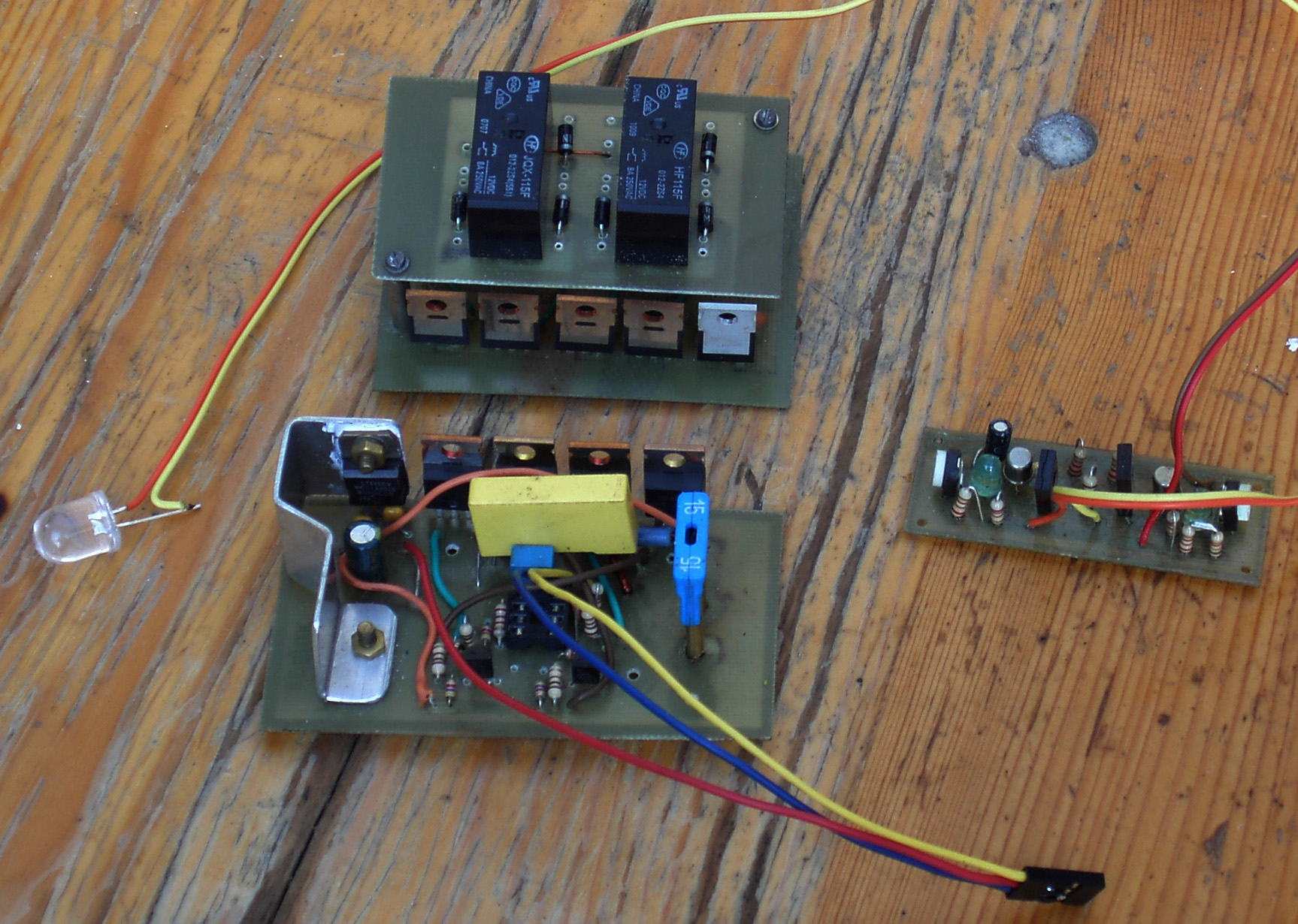
Electronics:
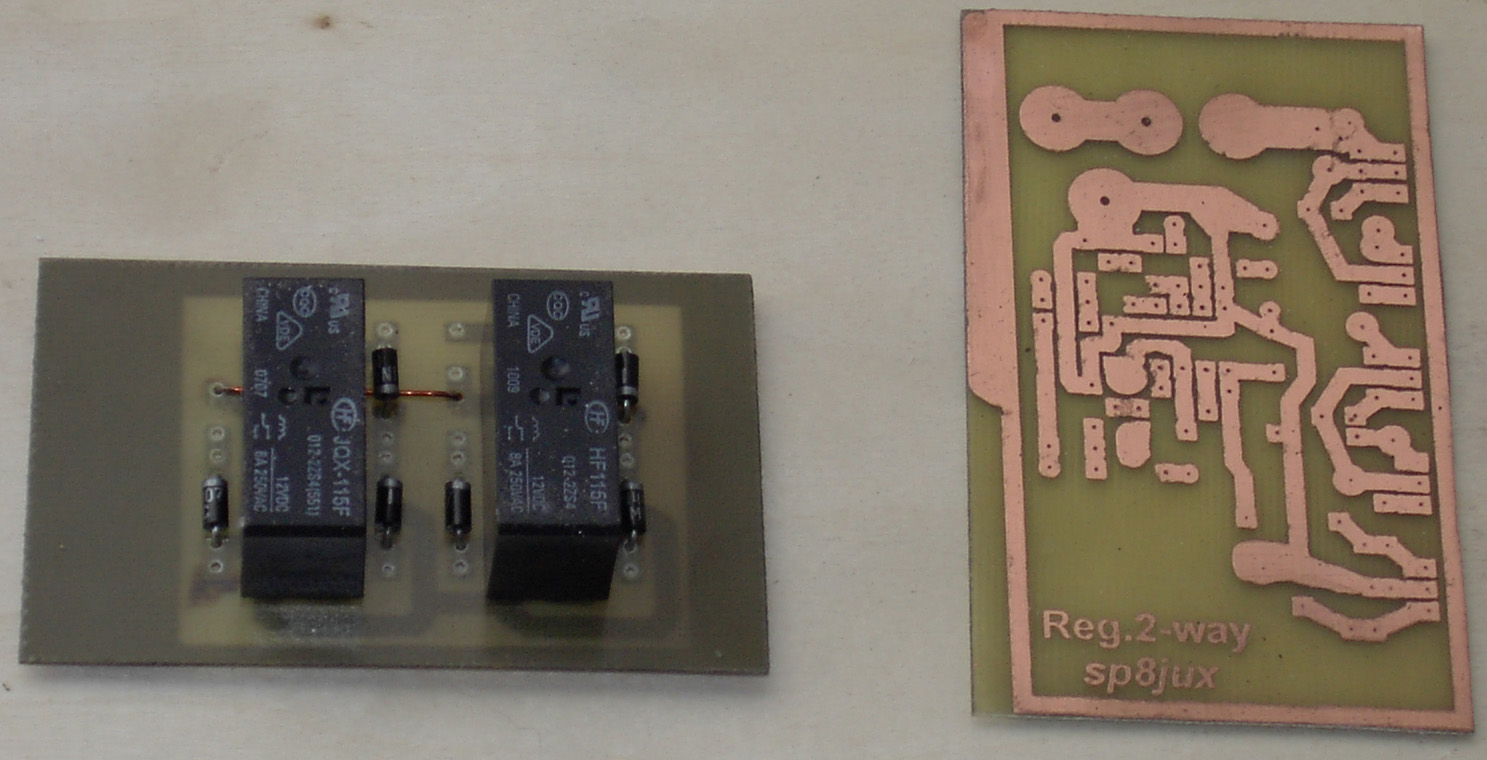
The bidirectional regulator was described by Bodzioch (search for Regulaor dwukierunkowy on elektroda.pl). The PCB was build thinking of cooling the transistors by heat sinks.
On/off switches:
One channel controls two buckets to dump the bait hooks and drain rods, and the second one switches on/off the LCD light (red – back, white – front, green – left side, orange – right side) and also the survey system: the buzzer and the transmitter 10mW with frequency 160MHz. This system switches on also when the battery voltage drops below 10,2V.
Additional equipment:
The boat has a LED signalization of two parameters: overheat and battery discharge. When the accumulators are discharged, the led switches off (when the rpm of the motor gets to 0) and it lights still when the thermistor signalizes overheat.
Link to the detection transmitter (pdf): Detection transmitter
Remote control:
The transmitter – 4 channel E-sky 35MHz model EK2-0404E, after modifications:
adding a radiator to the transistor, an additional element to “Pi – L” filter, power outlet for charging socket, replacing the right stick with two potentiometers, adding a fifth channel, disassembling the trainer/student components.
The receiver – also E-sky, 6 channel, an additional amplifier was mounted (on J310 fet)
Conclusions:
After an hour of swimming, the speed of the boat was 1,5m/s, the boat easily overcomes waves. Turning radios lower than 0,5m. The boat accumulators can be charged form a car electrical installation.
The boat has some disadvantages: it's hard to maintain a straight path (too short hull), the backward is weak.
Construction of the cooler:



The bottom with the cooler is combined with the hull.



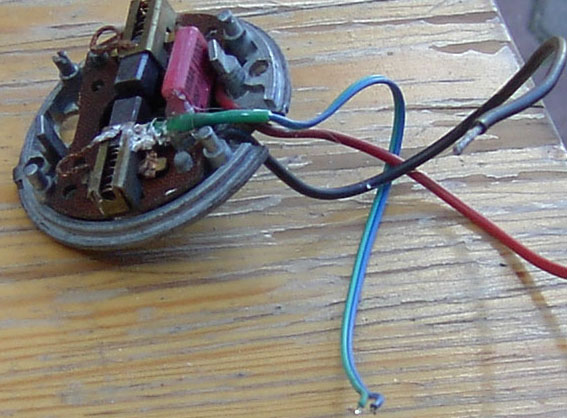
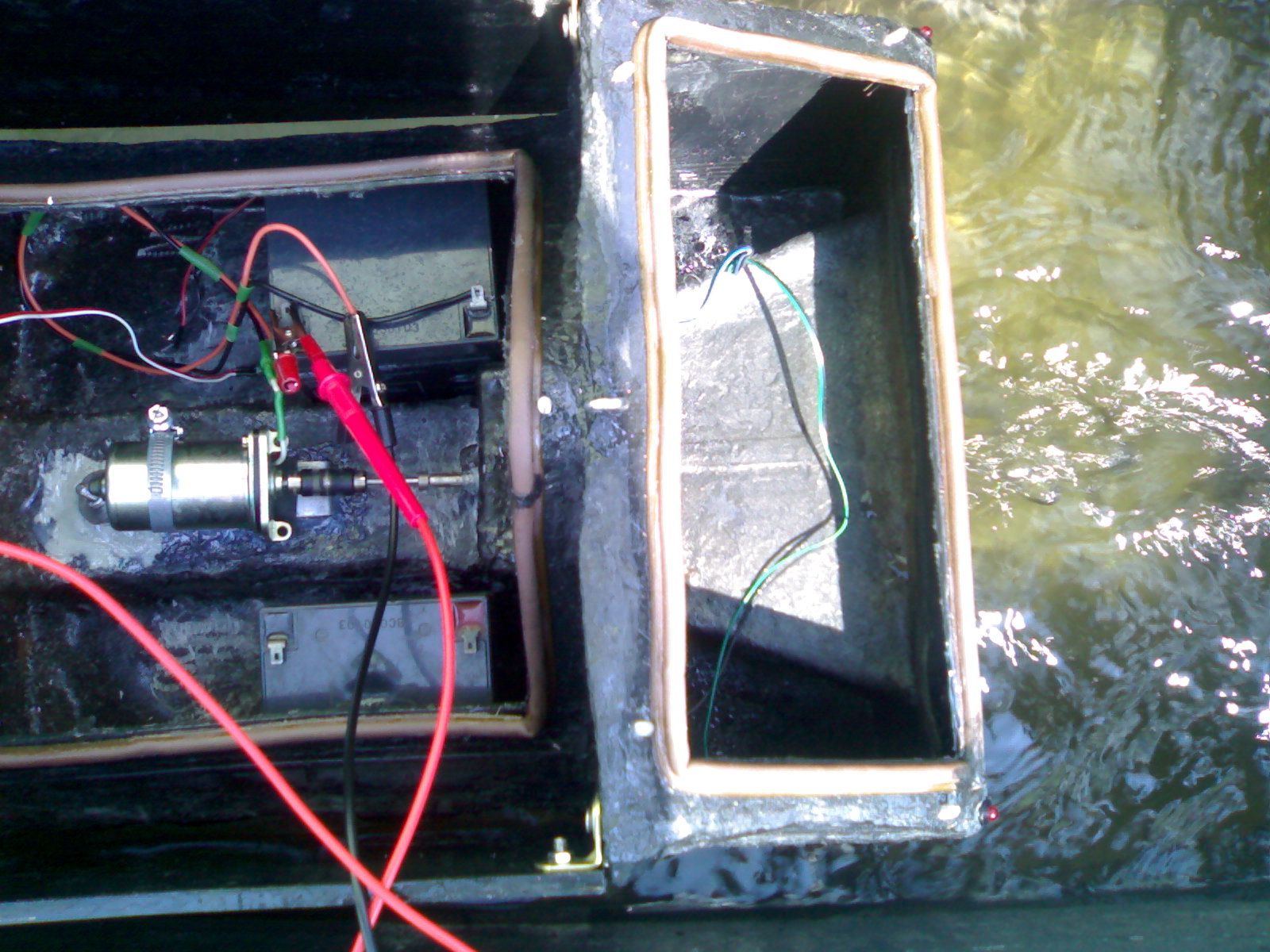
Mounting the base of the motor:


Mounting the motor, suppression capacitor (on the brushes), a thermistor touches the brushes (with paste).


The containers for the baits are cut-off from an old window frame.

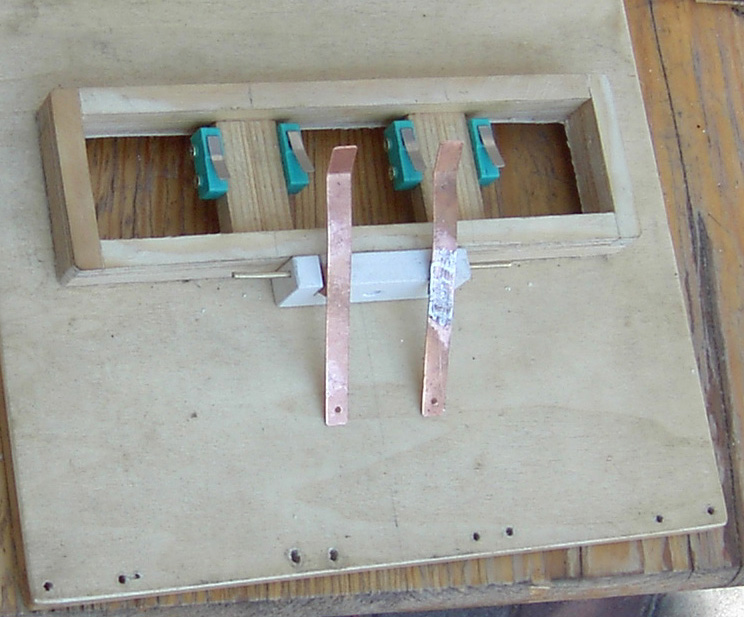
The mechanics to dump the bails and limit relays:

Electronics:

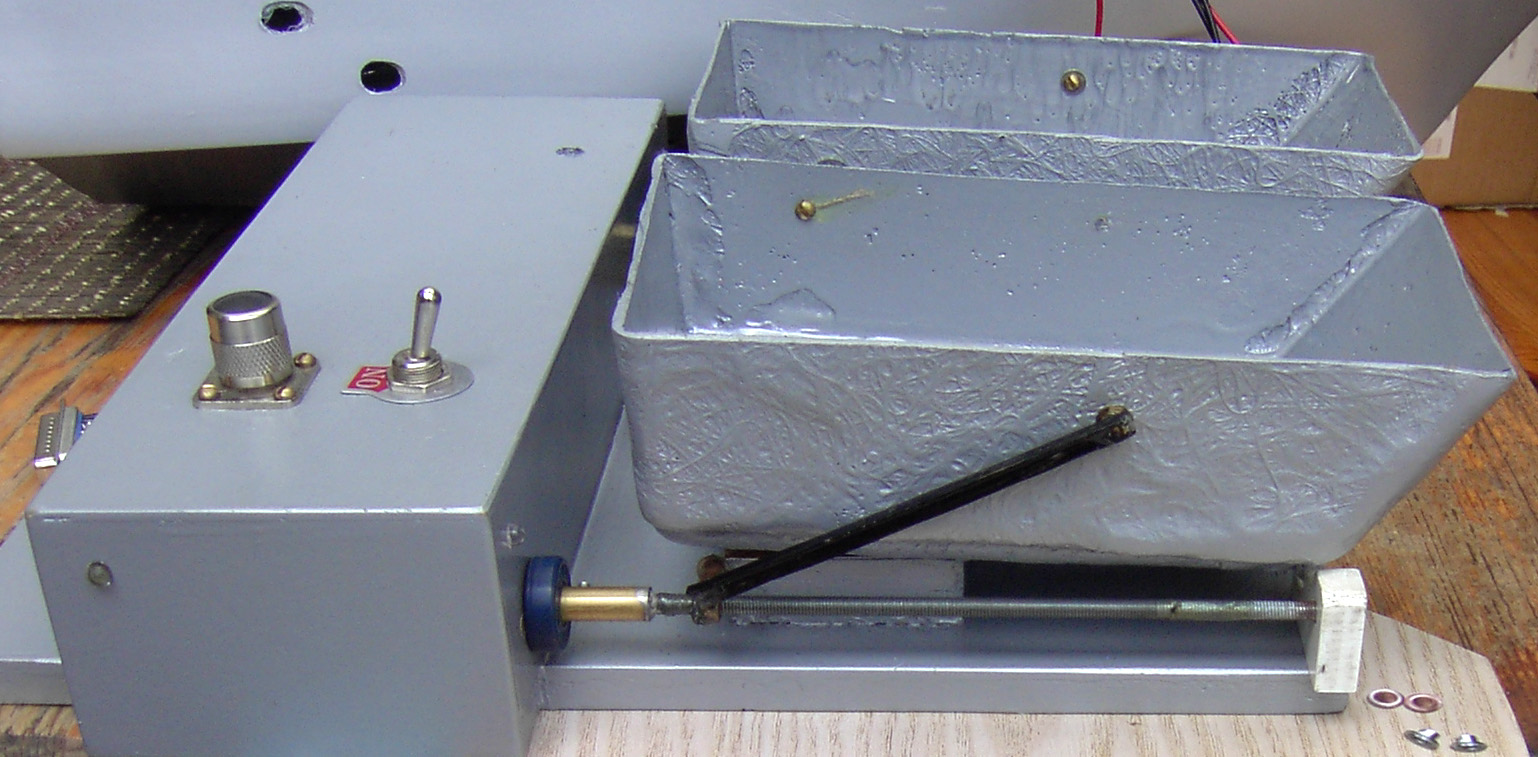
Drive mounting:


Painting and the pressure system to seal the body:
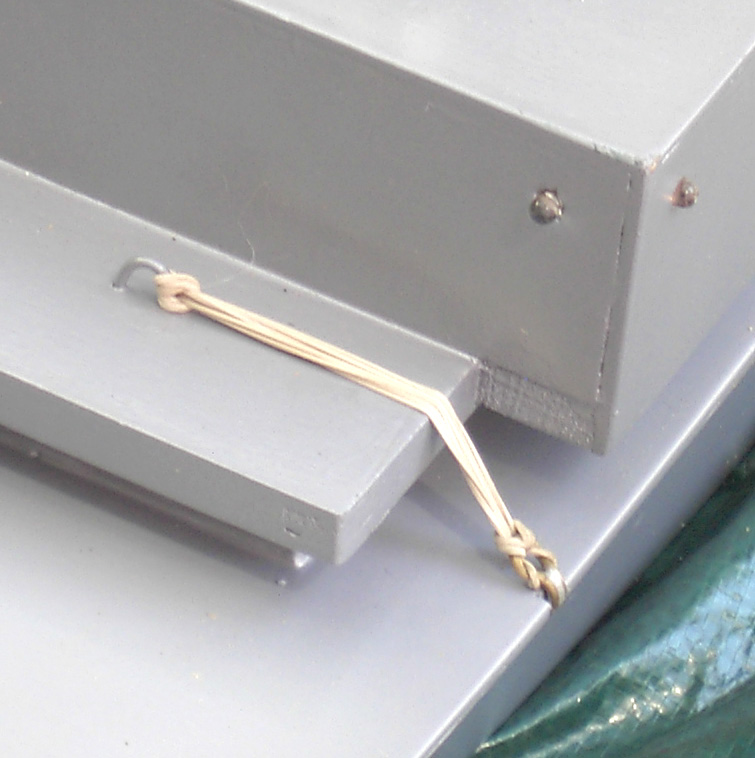
The dump system:



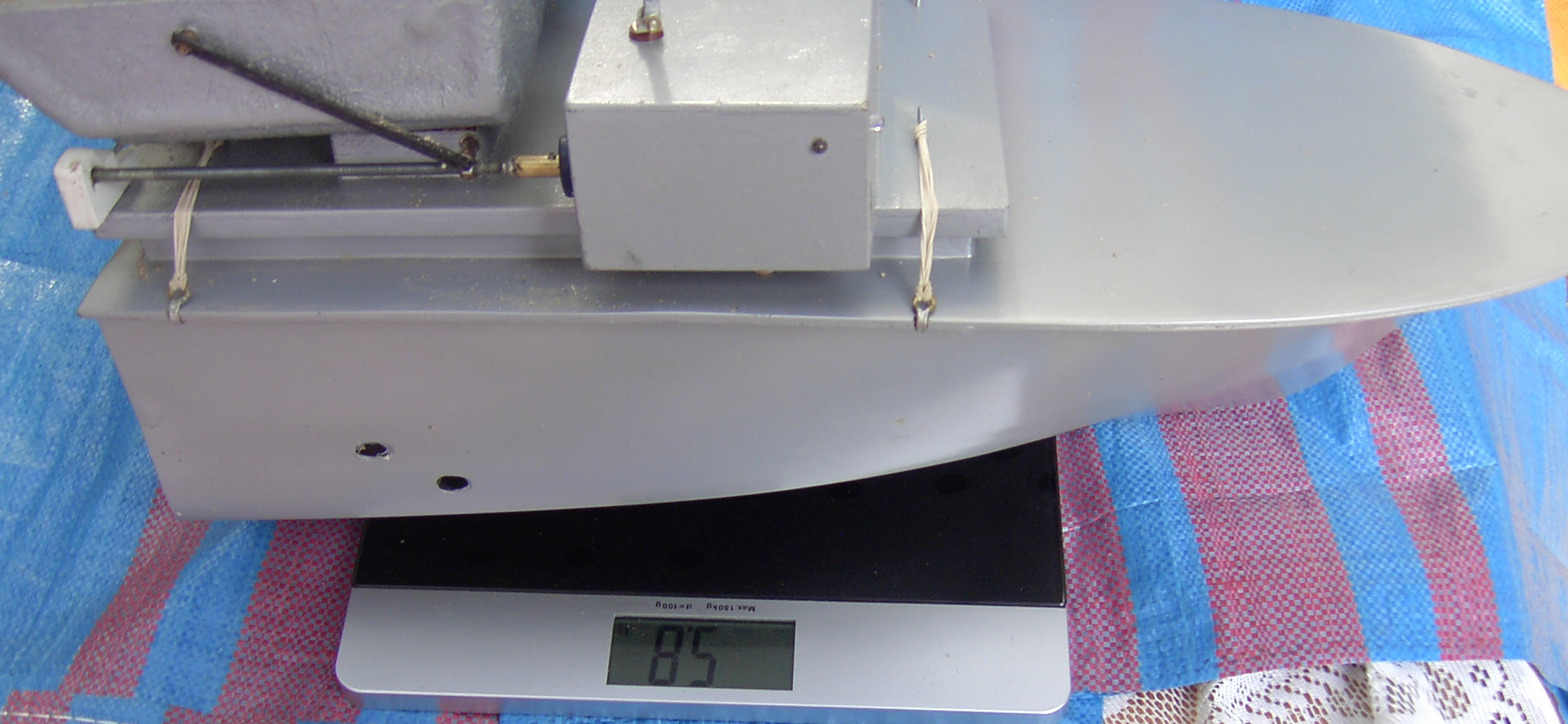
Final effect:


Power supply and dimensions (2*6V):







Link to original thread – RC łódka wędkarza do wywozu zanęty