newbie2023
Newbie level 4

Hi everyone,
I'm studying design a moto driver circuit. I feel confused about how to choose the devices.
If the bus voltage = 40V, and the Vbs = 15V. Is the 16V nldmos/pldmos(BV=18V@MIN,25@TYP)enough for my design?
Or I should choose 60V devices which is greater than 40V + 15V ?
Thanks a lot!
I'm studying design a moto driver circuit. I feel confused about how to choose the devices.
If the bus voltage = 40V, and the Vbs = 15V. Is the 16V nldmos/pldmos(BV=18V@MIN,25@TYP)enough for my design?
Or I should choose 60V devices which is greater than 40V + 15V ?
Thanks a lot!

 . I'm not sure whether choose 1.5*VBUS or 1.5*VBS.
. I'm not sure whether choose 1.5*VBUS or 1.5*VBS.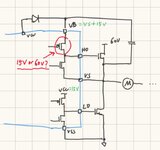
")