Vermes
Advanced Member level 4

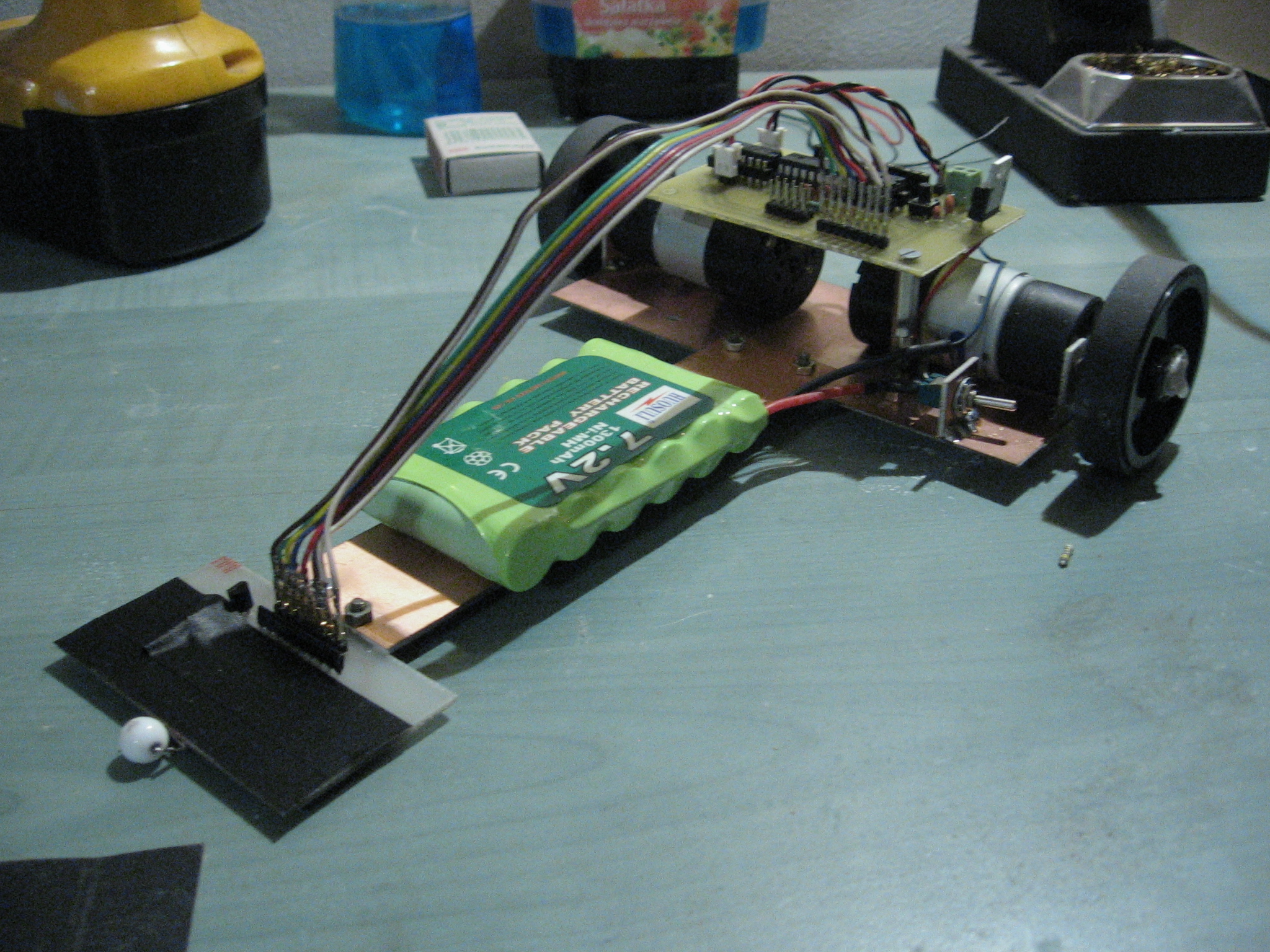
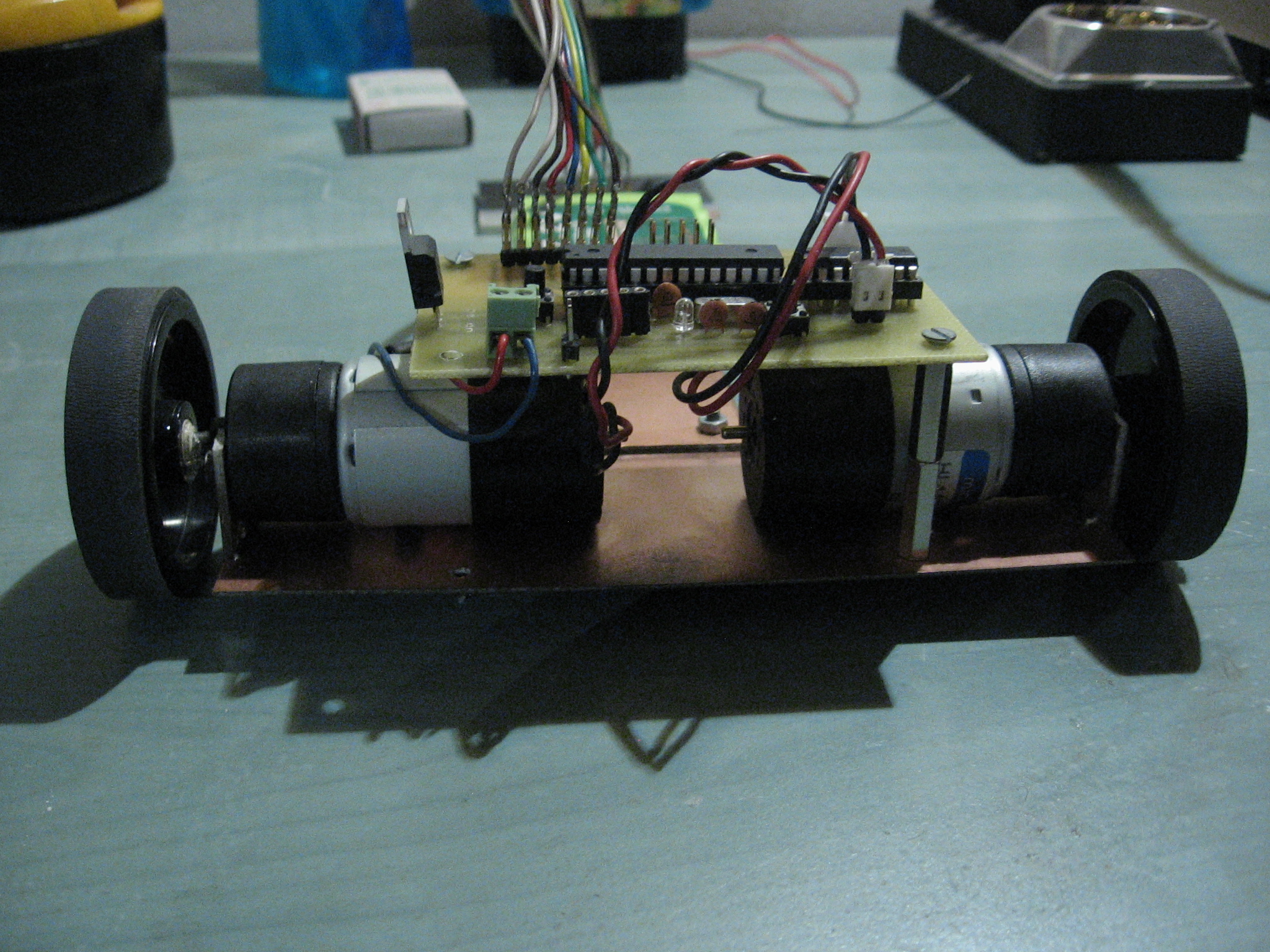
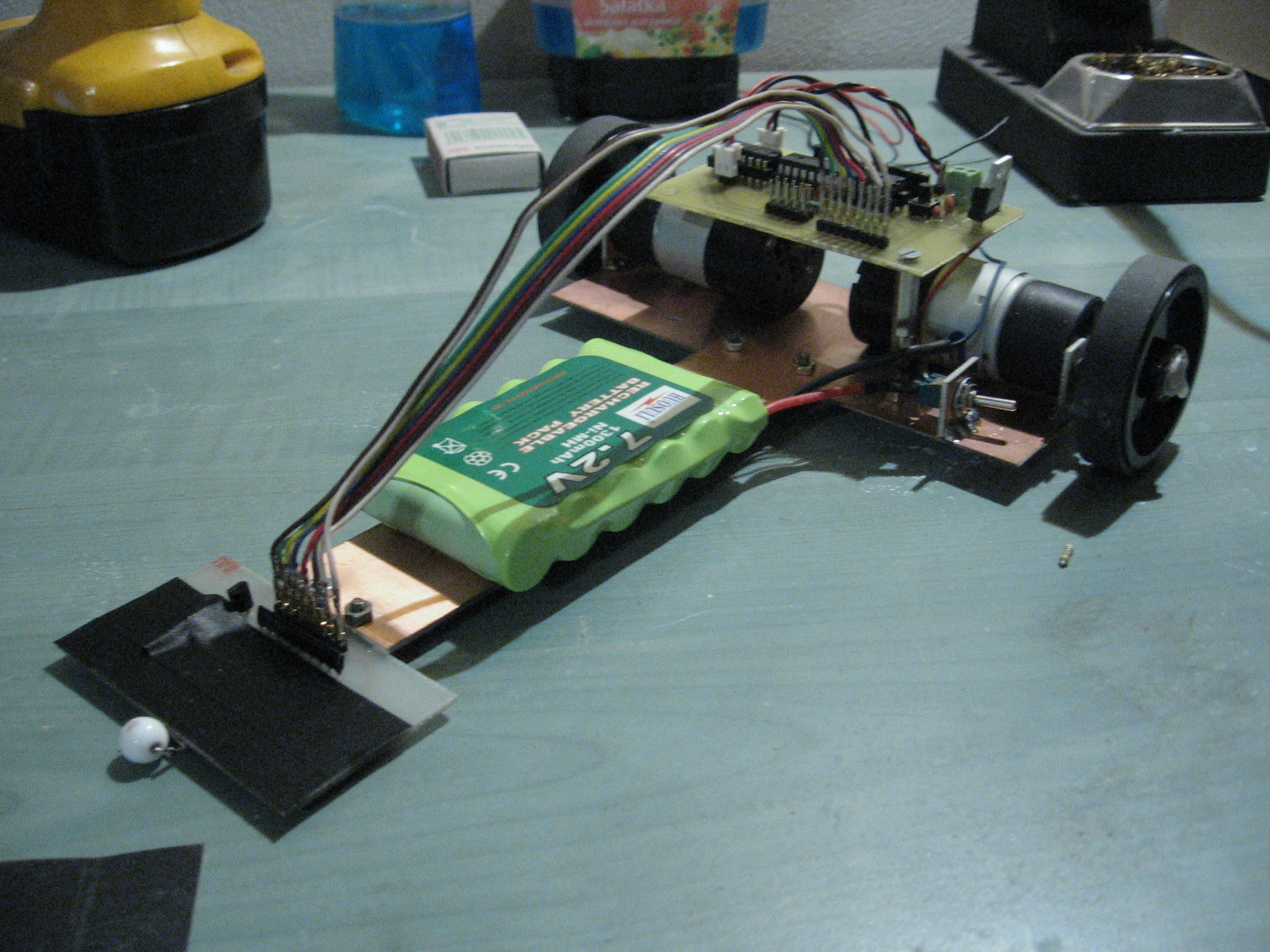
Pathfinder III robot was built to practice work with PID regulator.
Mechanics:
- micromotors engines 220rpm
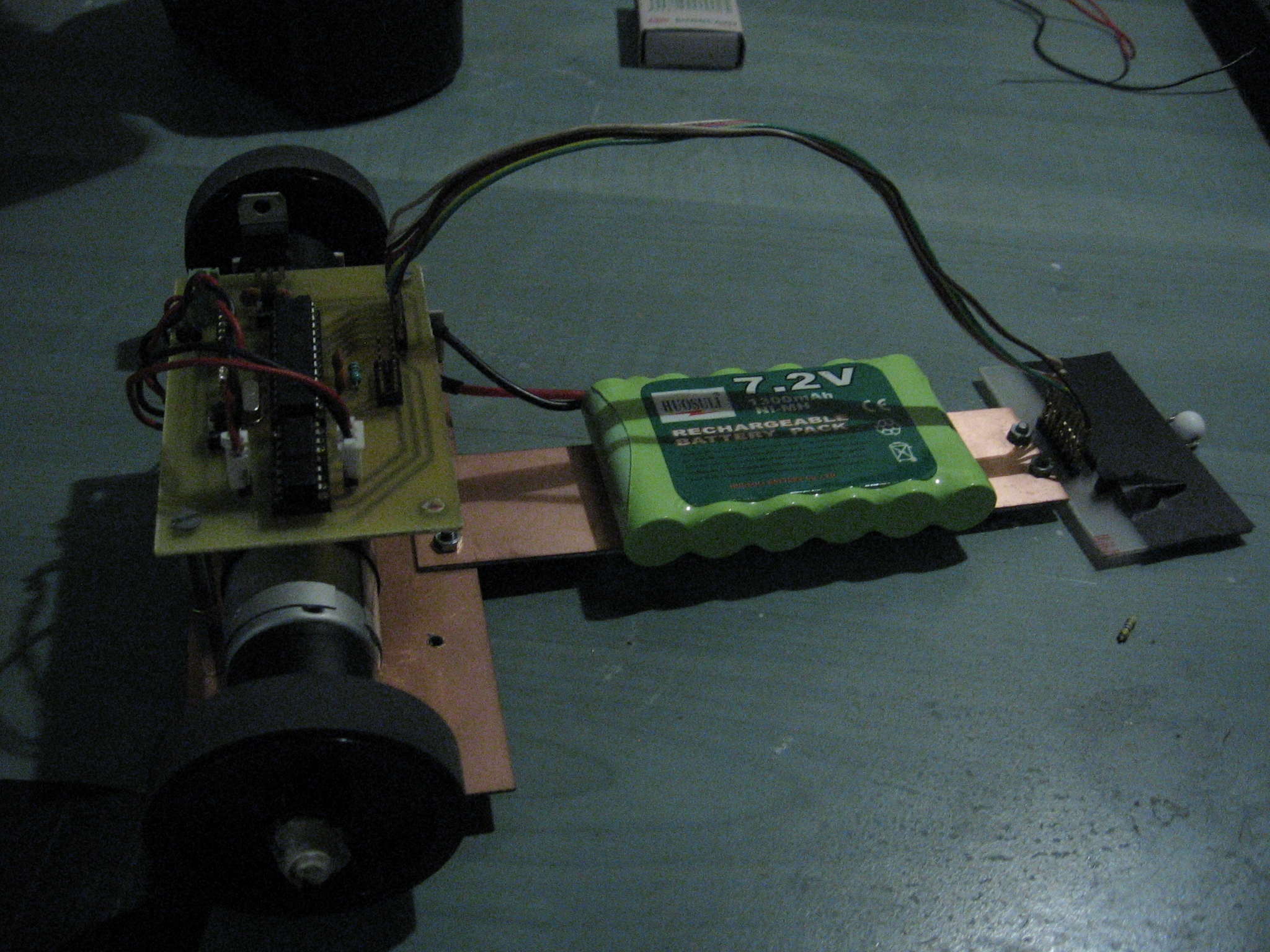
- laminat construction
- wheels made of printer rolls
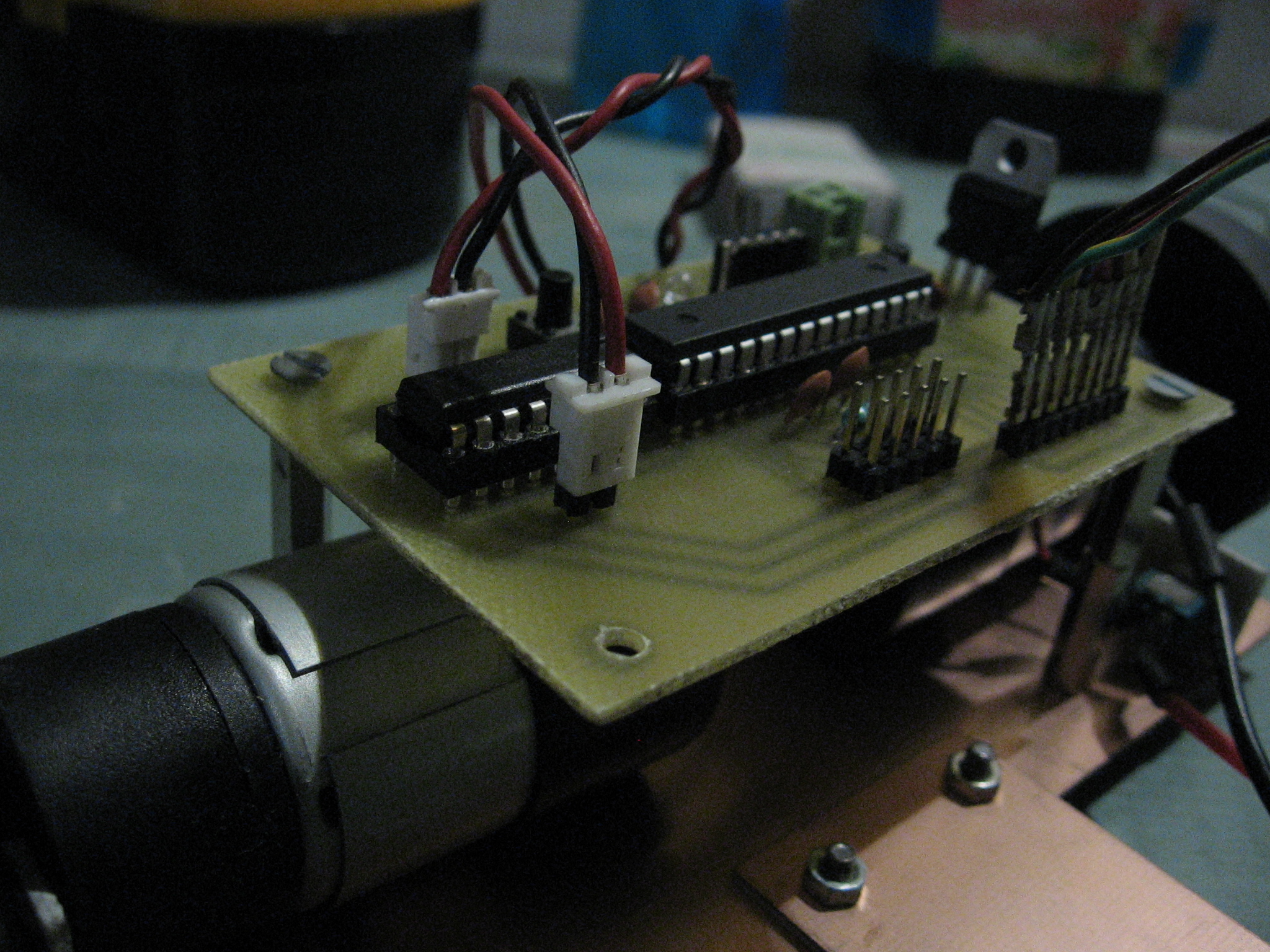
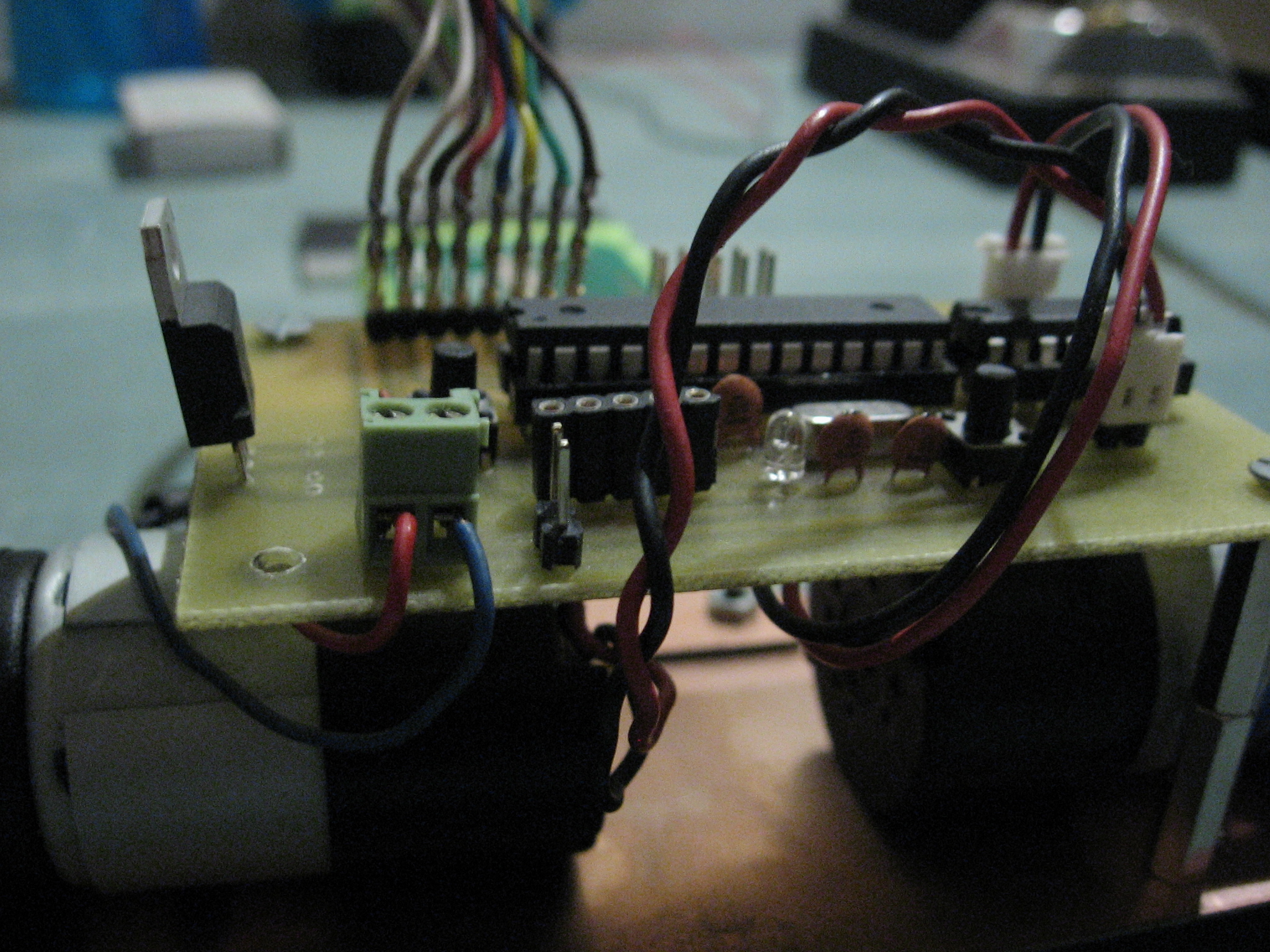
- Atmega8 controller clocked at 16MHz
- bridge h L293
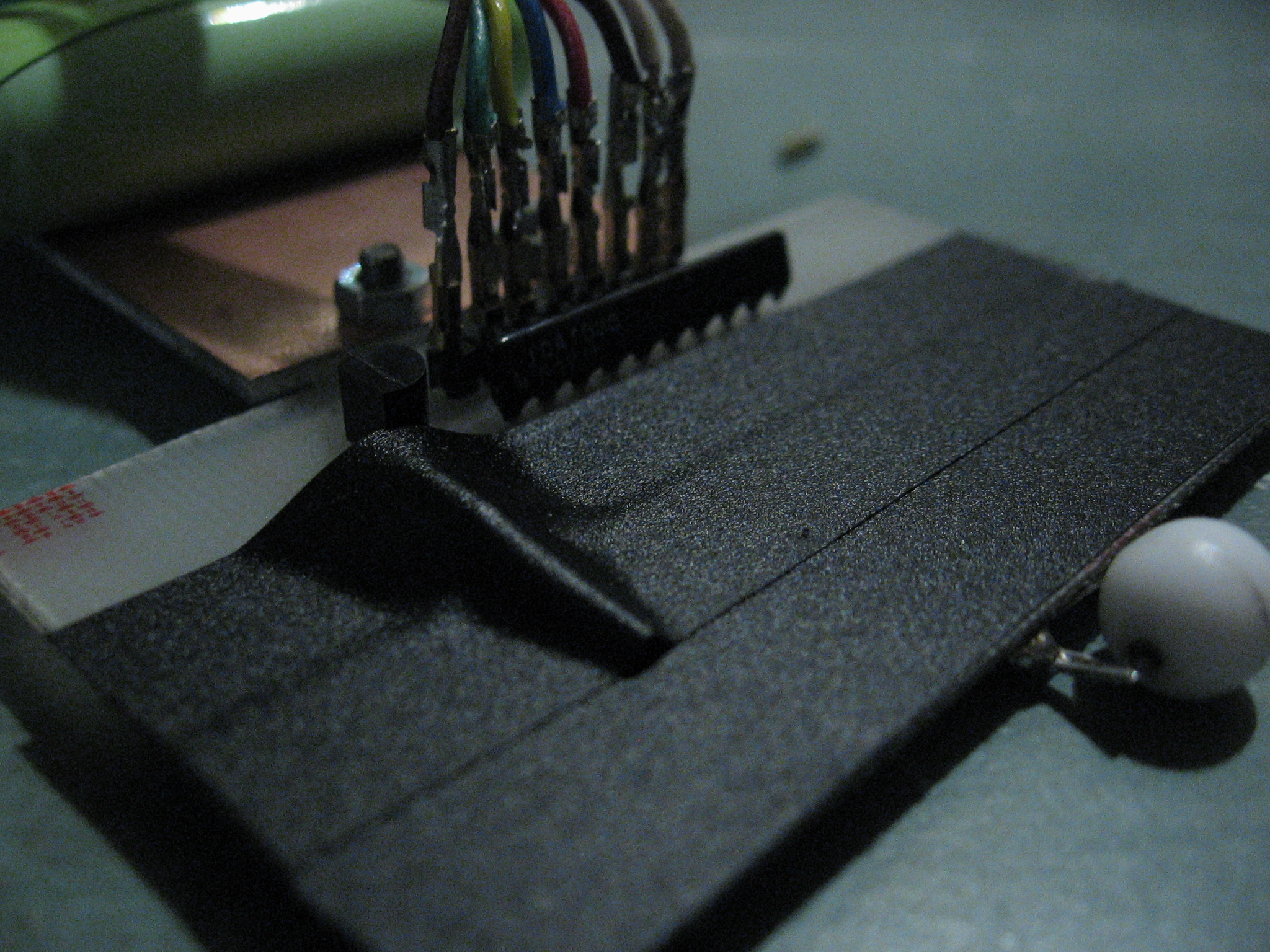
- sensors: 6 ktir0711
- power supply: NI-MH package


Link to original thread (useful attachment) – Tropiciel III - robot linefollower


