kanni1303
Full Member level 3

- Joined
- Jun 29, 2012
- Messages
- 164
- Helped
- 12
- Reputation
- 24
- Reaction score
- 11
- Trophy points
- 1,298
- Location
- Chennai, Tamil Nadu, India
- Activity points
- 2,718
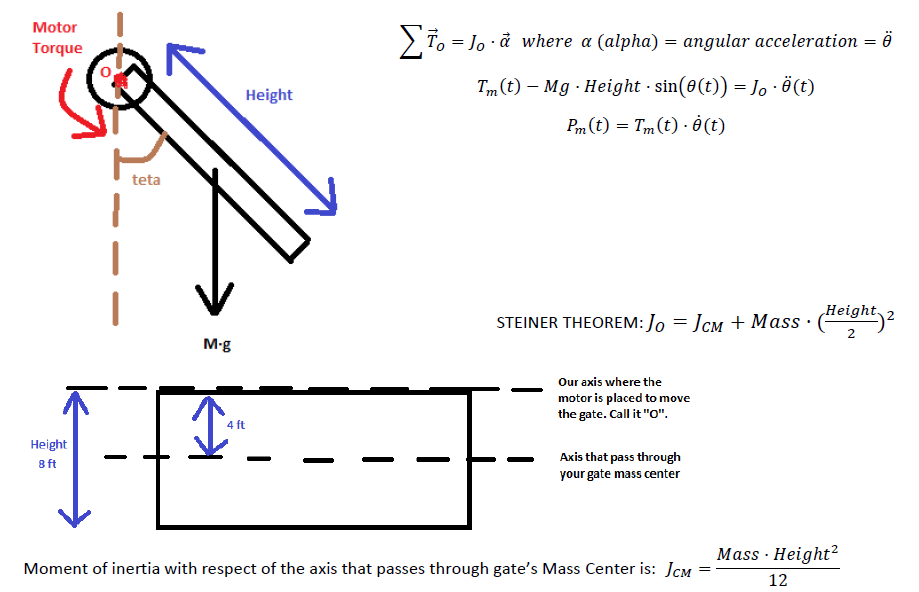
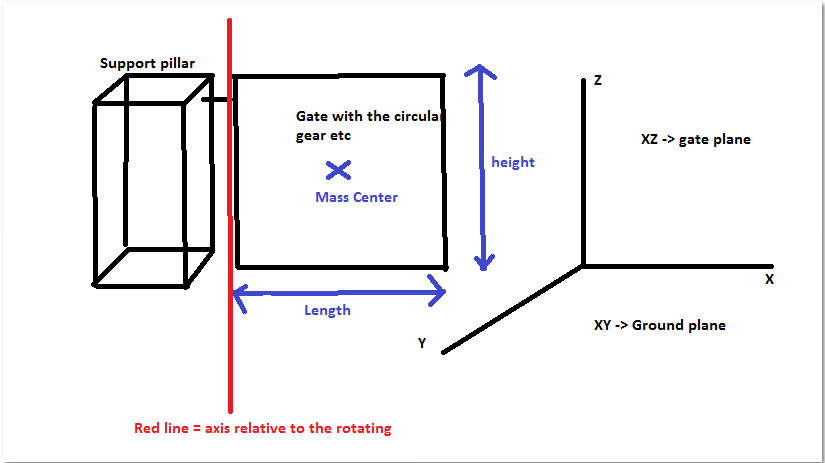
Hi, We are designing RF controlled swing gate open/close controller, we finished the controller part and tested with proto, but we don't know how to calculate power rating for the actual Motor to drive the Swing Gate of about 10ft long, 8ft height and 350KGs. Help me to calculate the power required to swing the gate. for moving the gate I can use f=ma expression and after that I may derive the power depending type of motor, but for swing I don't know how...