Vermes
Advanced Member level 4


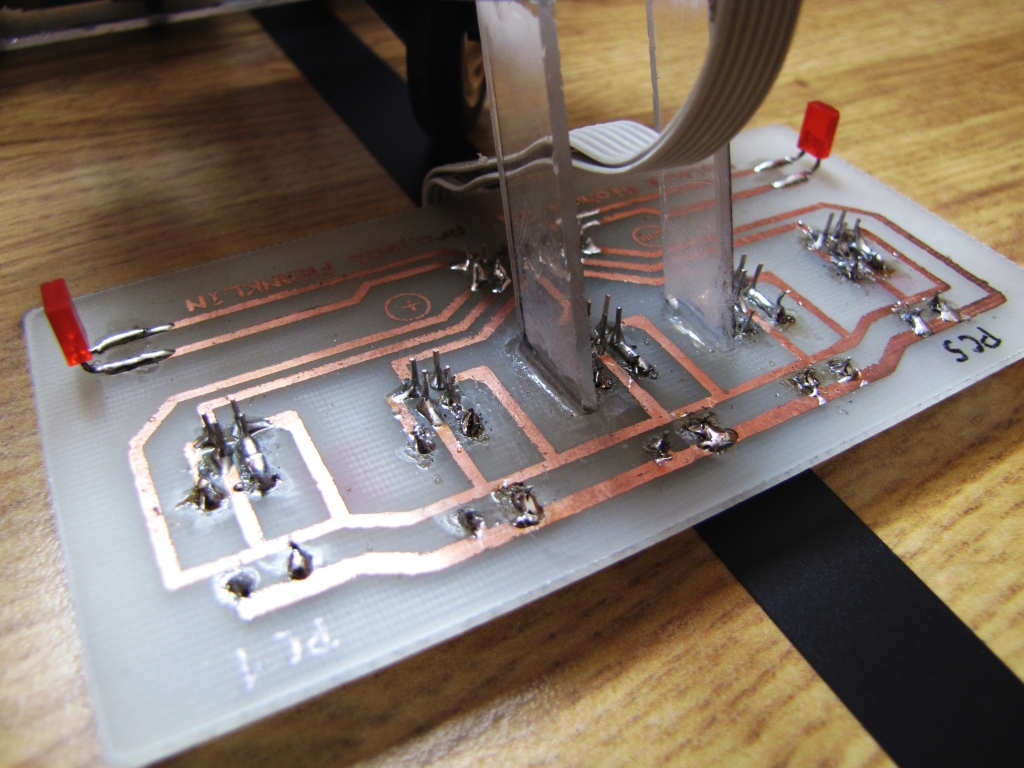
The robot is controlled by Atmega8 that cooperates with bridge H and reflective sensors CNY70. Power supply is 2x9V for the engines and sensors and 1x3,6V for the microcontroller. The construction was made of plexiglass and one-sided laminate. PCBs were digested. The wheels are made of rolls to scroll tapes from an old cassette music player. Front wheel is used to maintain the structure and the freedom of robot.
The program was written in BASCOM. It works on the principle of conditional statements.
Pictures of the current look of the robot:



Link to original thread (useful attachment) – Linefollower Franklin v1.6