Vermes
Advanced Member level 4

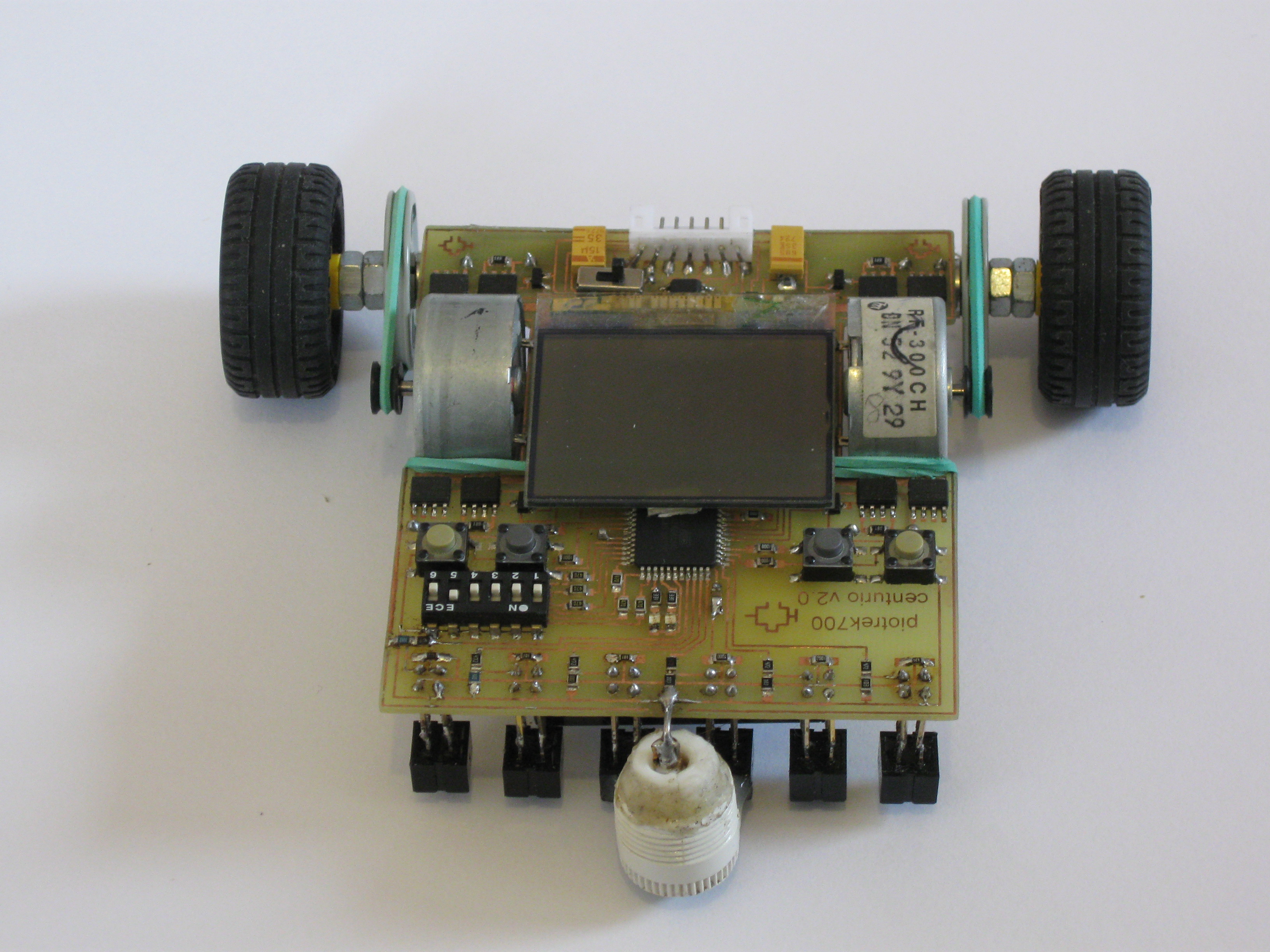
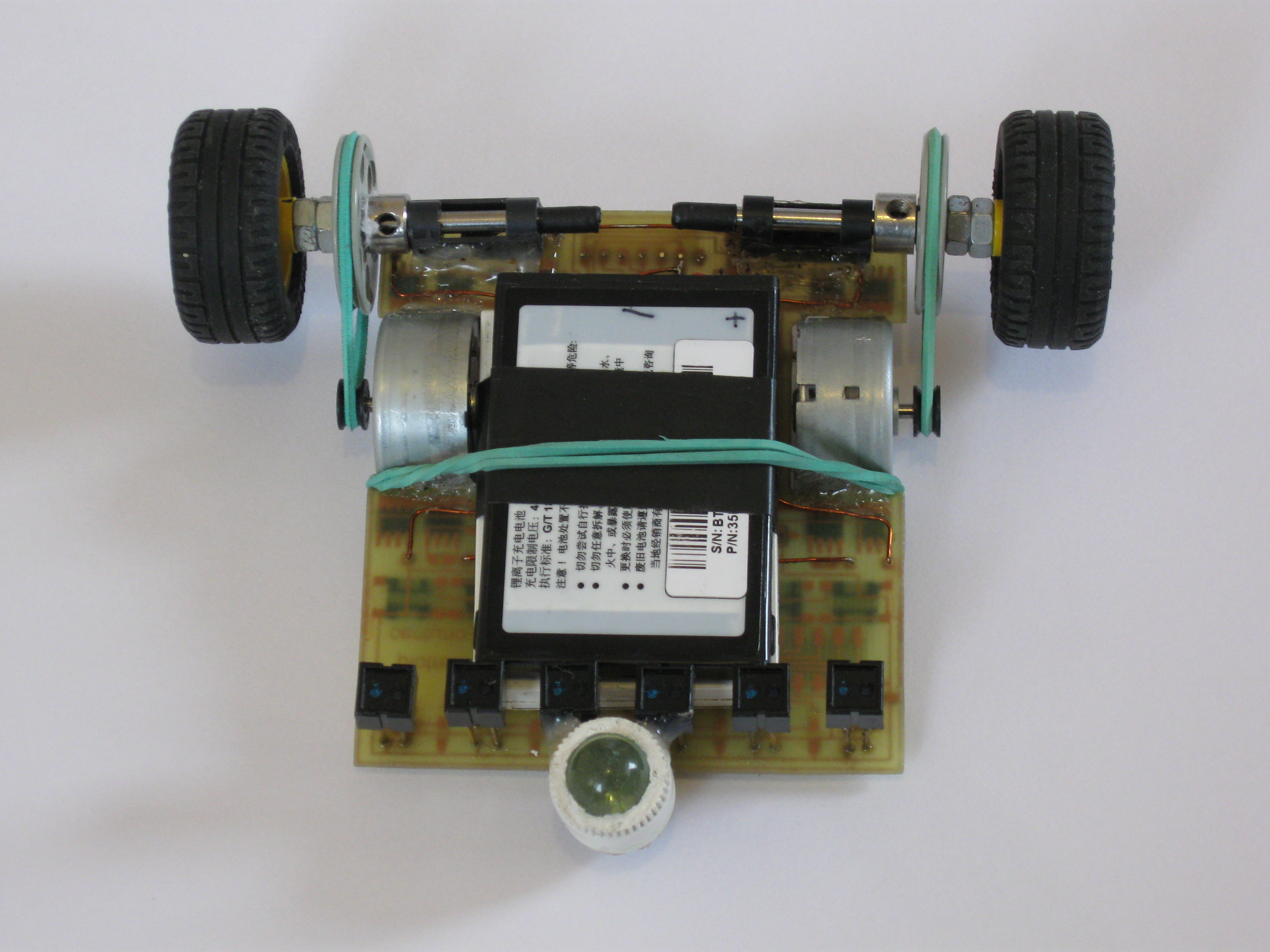
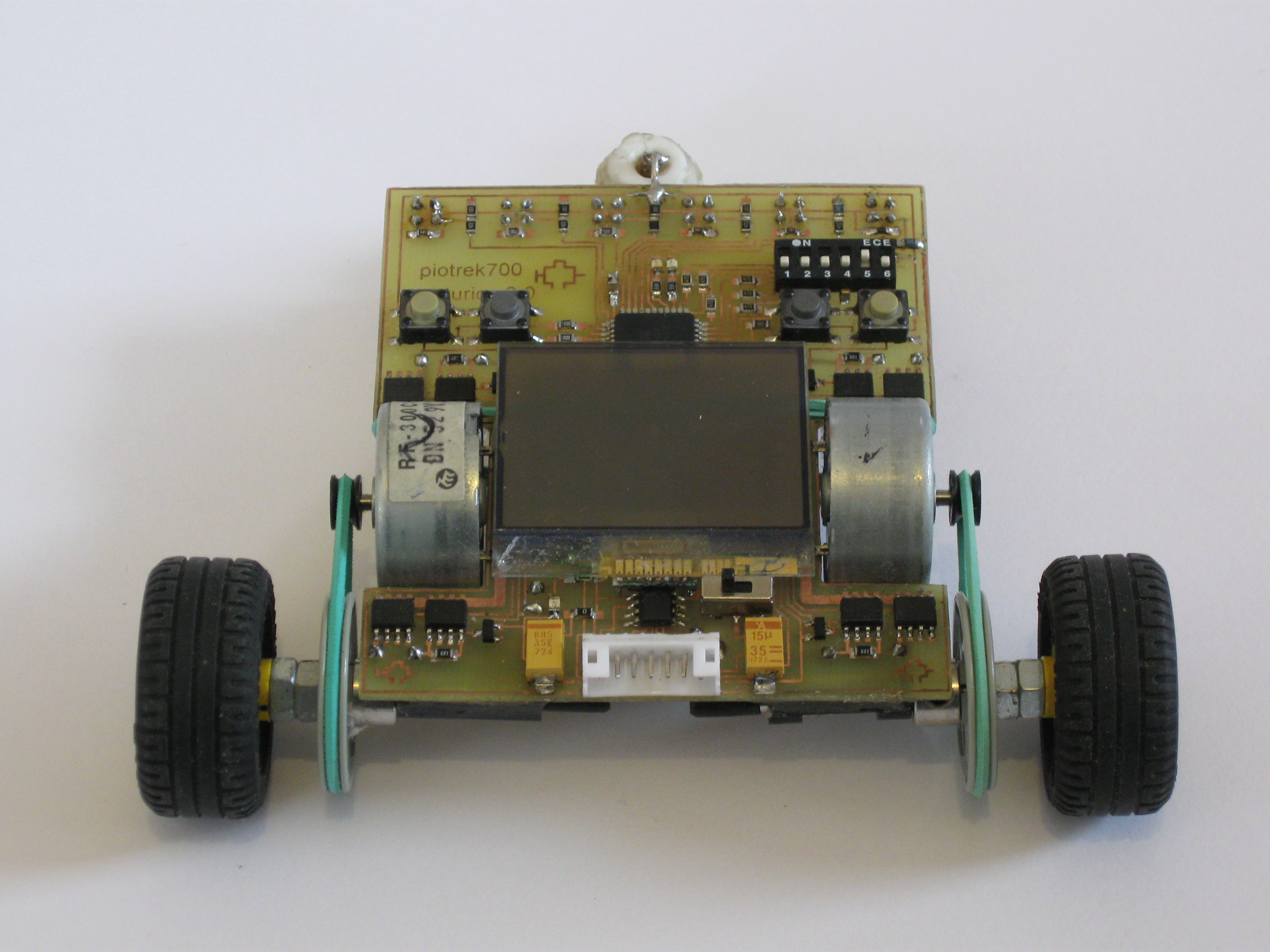
It is an improved version of linefollower robot Centurio. The PCB was made in SMD – its construction is very aesthetic.
How it works
Reflective sensors collect the signal which is then processed in the ADC converters. The signal is suitably processed so as to get the linear dependence of the distance of the centre line of toy car from the line on which it moves. Two buttons located under the display on the left are used to read the necessary information. White microswitch receives data about the background on which the linefollower will move, while the black button saves the parameters of the line. The line has to be darker, the greatest contrast possible, so the robot can work properly. The read values are used to the amendments resulting from the heterogeneity of light and different kinds of surface. Control is made by regulation of fulfillment of PWM signal, which controls both engines. The system has a programmed proportional-derivative (PD) regulator. The construction is equipped with LCD display from Nokia 3310 to make programming microcontrollers easier. The display provides current data about variables and other parameters needed to perform calculations. The first line on the display shows states of buttons, the second and third line show the light intensity values from each of the sensor converted into percentages. Then a line is visible, which corresponds to the deflection from the axis of the driving line. At the bottom of the display you can see filling of PWM (0-255). Library needed for operating the display can be found on: LINK.
After reading the values of background and line, the display goes into a standby state. Conditional function passes its support because the display slows down considerably the program work. During standby mode, a picture is showed on the display. The LCD can be enabled or disables by a dip-switch nr 1. Dip-switches 2-5 set the maximum speed (2->5). The last switch is STOP/START function. Two micro-switches on the right are not used.
Pictures:

And the video:
Link to original thread (useful attachment) – Centurio v.2 -Linefollower