Vermes
Advanced Member level 4

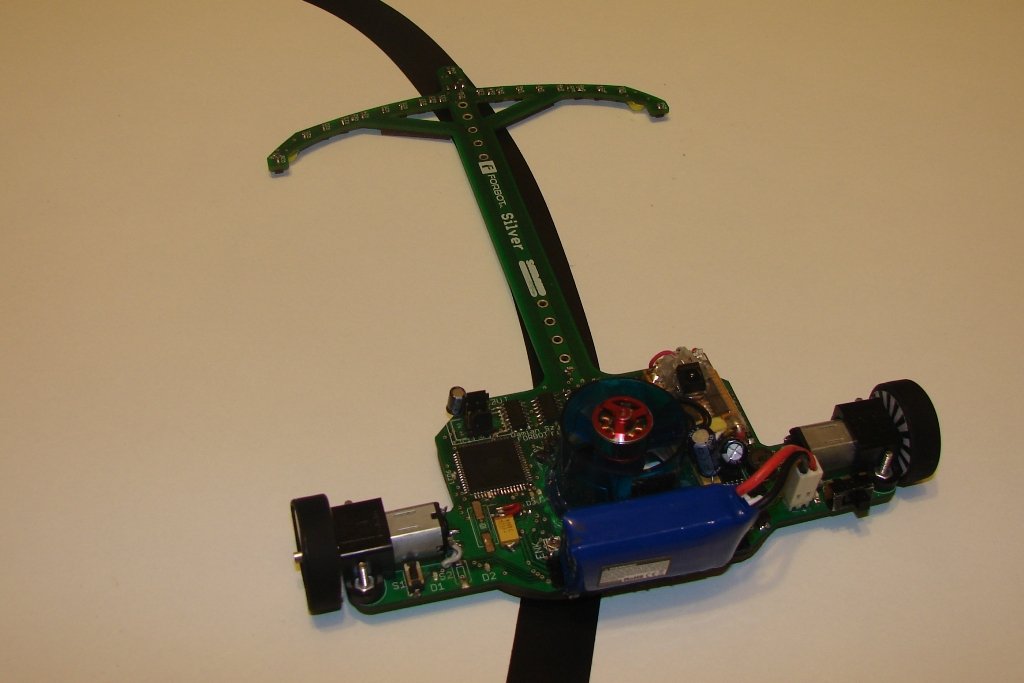
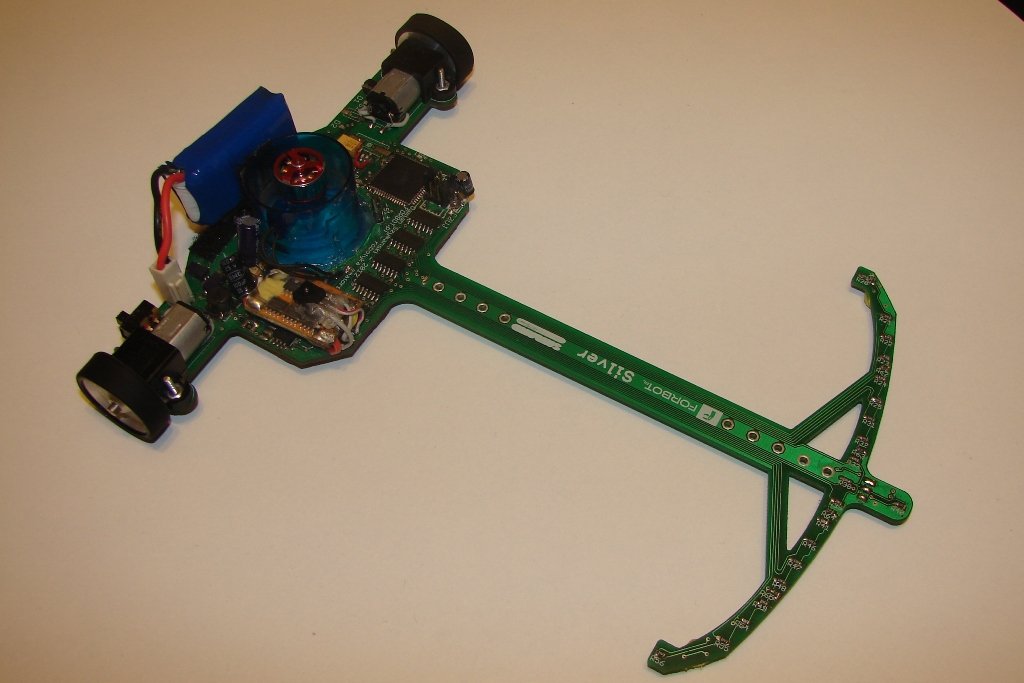
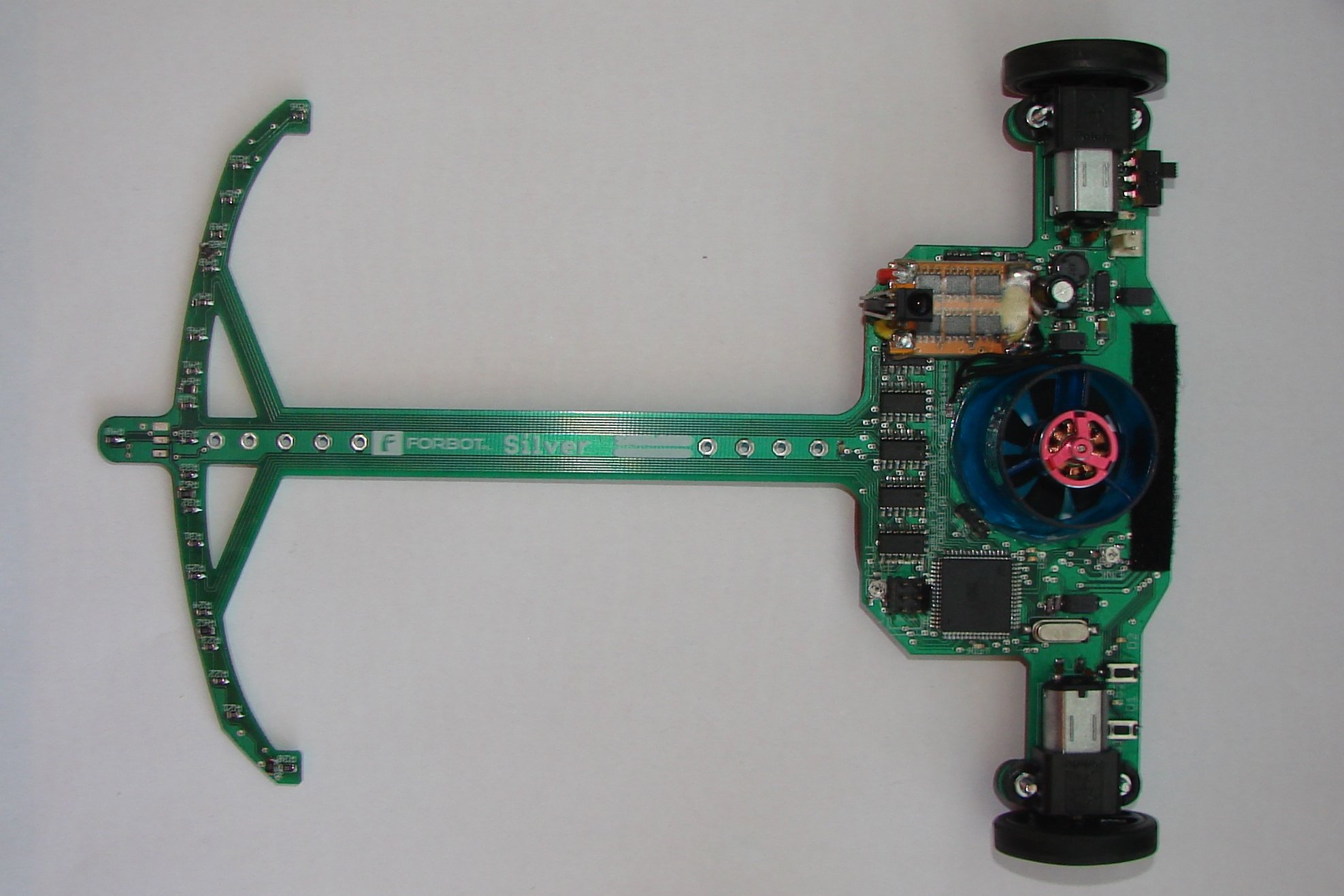
It is a standard construction of a linefollower. Main assumption was to create as light as possible robot.
Electronics:
Electronics is quite simple: 20 sensors KTIR and comparators. Microprocessor used in this project was Atmega128. There is also bridge TB6612 and driver for the turbine (turbine with brushless engine, which pulls air from behind the robot). The whole device is powered from package 2S 350mAh.
Mechanical construction:
It consists of a PCB, two Pololu 10:1 engines in HP version and a wheel made of aluminum.
Program:
Program was written in C. Sensors read is digital.
Pictures:
Videos:
Link to original thread (useful attachment) - Robot LineFollower Silver