Vermes
Advanced Member level 4


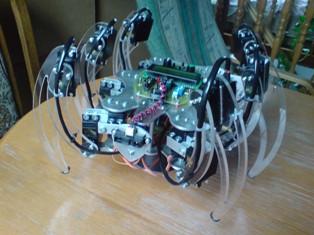
Hexapod is an interesting device because of its stability and ease of generating gait, which are much better than in similar constructions with fewer legs.
To make the costs lower, it is advised to use the cheapest model servomechanisms TowerPro SG5010.
Mechanics:
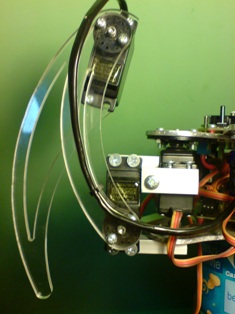
It started with a big piece of plexiglass. This material was a base for prototype legs, on which it was possible to start programming.


The construction was quite brilliant and everything was easy to combine by screws heated by a solderer. On the other hand, the precision was very poor. The final version of hip elements was made of aluminum profiles.

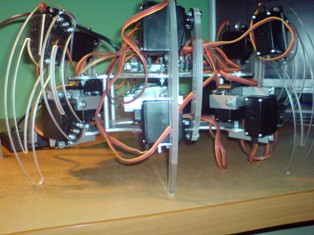
As soon as the first body was finished, all the legs were fused and the further programming was possible.

Project of the final version of the body was made on a plotting paper. After matching a proper shape, all was cut from 3mm aluminum plate. Both sides were linked together by threaded aluminum bars.


The hip elements prepared before were added then with the rest of 5mm plexi cut on CNC milling machine.


Electronics:
Controlling the robot is based on two AVR microcontrollers. First one, Atmega16 became a 24-canals servomechanisms driver. It sends steered PWM signal into each servomechanism. CPU was based on Atmega32. Reversed kinematics is counted in it. CPU also supports the 2x16 display on HD44780 driver used to view menu. As the robot's 'eyes', SHARP GP2D120XJ00F distance sensor was incorporated. The sensor was plugged into the ADC transmitter. It helps the robot to avoid obstacles. The communication between AVRs runs through USART.
The robot is powered by 6V accumulator. It was designed to keep it in its body, but so far it uses a cable.


 [youtube]http://youtube.com/watch?v=ElYhDn7wJ-o[/youtube]
[youtube]http://youtube.com/watch?v=ElYhDn7wJ-o[/youtube]Link to original thread – Hexapod, pierwsza konstrukcja