Naveed Ahmed
Member level 4

Practicle/Real Setup:
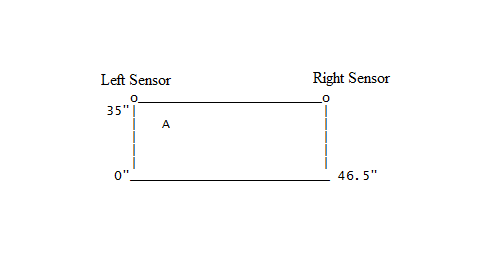
I have a glass screen of length 35" and width 46.5". I have mounted one force sensor at the left
top of glass screen and another sensor on the right top of the glass screen. Now, if I press my glass
screen from any point on the screen I shall get some force at the left and some force at the right sensor output accordingly.
o_______________________o
35"| |
| A |
| |
| |
| |
0"_________________________ 46.5"
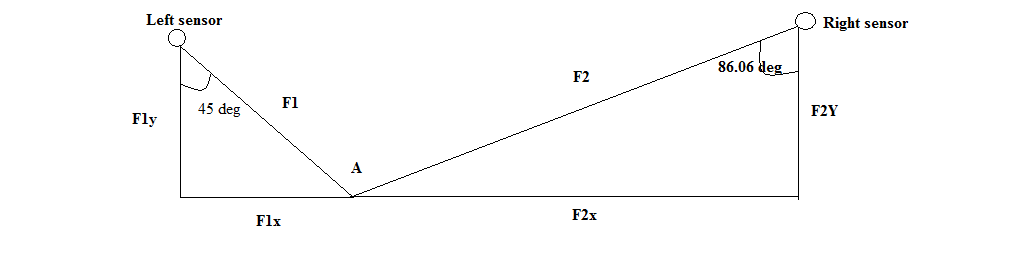
I have hard and tought time to solve this problem. I pressed at point A with (x,y) = (3,32). At the left sensor I am
getting 7.015 Newtons. How much force I shall expect/get at right sensor?? Please refer the below info as well.
Point A with left sensor:
Angle = 45 degrees
Distance from sensor = 4.24"
Point B with right sensor:
Angle = 86.06 degrees
Distance from sensor = 43.6"
You can calculate angle and distance with your own calculation if I am wrong.
Thanks alot in advance,
Best Regards,
Naveed
---------- Post added at 08:33 ---------- Previous post was at 08:26 ----------
Sending image for your reference.
Thx
I have a glass screen of length 35" and width 46.5". I have mounted one force sensor at the left
top of glass screen and another sensor on the right top of the glass screen. Now, if I press my glass
screen from any point on the screen I shall get some force at the left and some force at the right sensor output accordingly.
o_______________________o
35"| |
| A |
| |
| |
| |
0"_________________________ 46.5"
I have hard and tought time to solve this problem. I pressed at point A with (x,y) = (3,32). At the left sensor I am
getting 7.015 Newtons. How much force I shall expect/get at right sensor?? Please refer the below info as well.
Point A with left sensor:
Angle = 45 degrees
Distance from sensor = 4.24"
Point B with right sensor:
Angle = 86.06 degrees
Distance from sensor = 43.6"
You can calculate angle and distance with your own calculation if I am wrong.
Thanks alot in advance,
Best Regards,
Naveed
---------- Post added at 08:33 ---------- Previous post was at 08:26 ----------
Sending image for your reference.
Thx