CataM
Advanced Member level 4

- Joined
- Dec 23, 2015
- Messages
- 1,275
- Helped
- 314
- Reputation
- 628
- Reaction score
- 312
- Trophy points
- 83
- Location
- Madrid, Spain
- Activity points
- 8,409
If we desire the output to be the same as the input, why we just simply implement a controller transfer function inverse to the plant's transfer function ? Why we implement it with feedback instead with a simple open loop ?
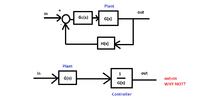
Why we do not use the 2nd option from the above picture ?

Why we do not use the 2nd option from the above picture ?

