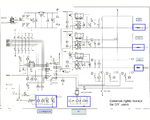
Your motor is driven by pulses of current. The "DC bus" is the voltage behind the current, ~1.5 X line voltage, two big capacitors to make sure its good DC. The current taken by the motor is monitored by R36, that other block is a filtering network to allow the compensation to be applied as fast as possible without any over shoot in the motors position. L1->3, make sure that any stray capacity on the leads to the motor do not over dissipate the driving transistors. At the driving frequency should limit the current to , say 2X that of the motors nominal current?
Frank