Vermes
Advanced Member level 4

The idea of making this robot was connected with finding an interesting element - a CCD matrix (ILX524K) while opening a dead scanner. The matrix was 2700 pixels in 3 colors which were aligned in one line. In composition with a little objective, it was perfect for a linefollower sensor.

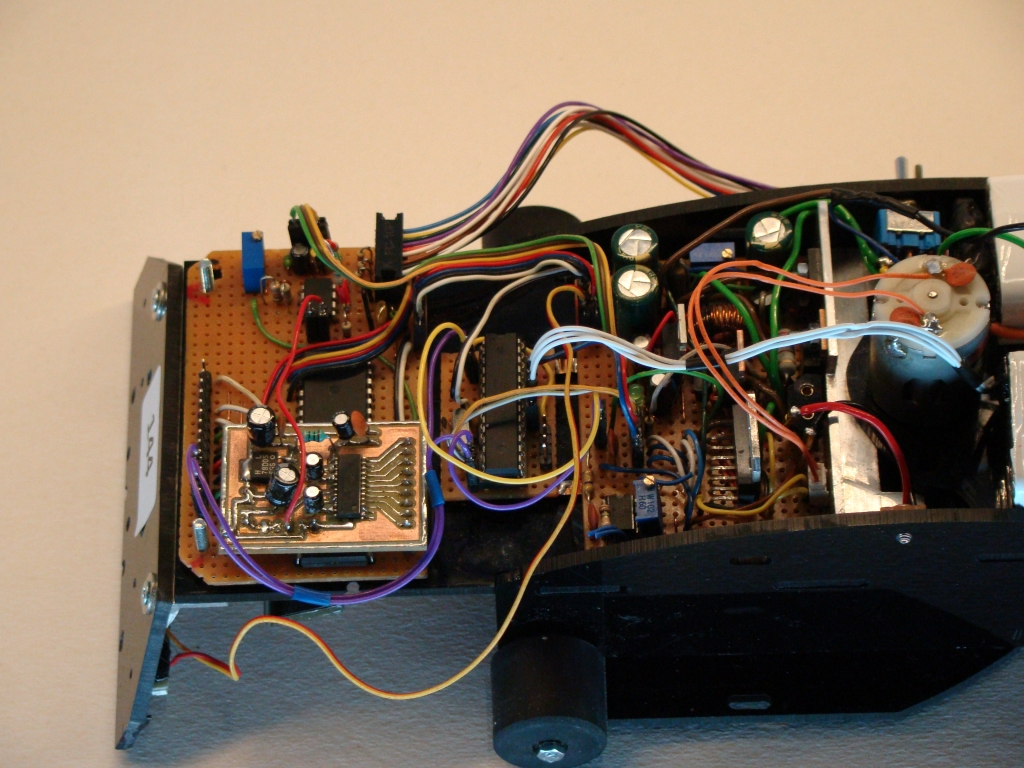
The handling of the matrix isn't as easy as it may look. It is necessary to generate three clock signals, strengthen and encode the analogue signal. It is important to do all that in a possibly short time, because at a speed of about 1m/s every millimeter counts. The matrix handling is with Atmega32, because it has enough ports and SRAM memory. A/D converter type ADC1175CIJM, LM6172IN amplifier and R-2R ladder as an offset for the matrix signal cooperate with Atmega32. It is possible to achieve about 600-1000 fps. The matrix can achieve even 1800 fps, but the irradiation time cannot be too short, because it would be impossible for the robot to distinguish the lines. With such speed it is necessary to light the surface additionally, because when the room is equipped with a bulb 100 times per minute – it's too dark.
The location of the line is sent to Atmega48 by usart with the speed of 0,5 Mbps. A standard PID controller is there. The engine is easily controlled by mosfet N and in order to break, the terminals are short-circuited. The control engine is controlled by popular L298. The feedback is controlled by the potentiometer and inbuilt in Atmega48 ADC converter.
About power
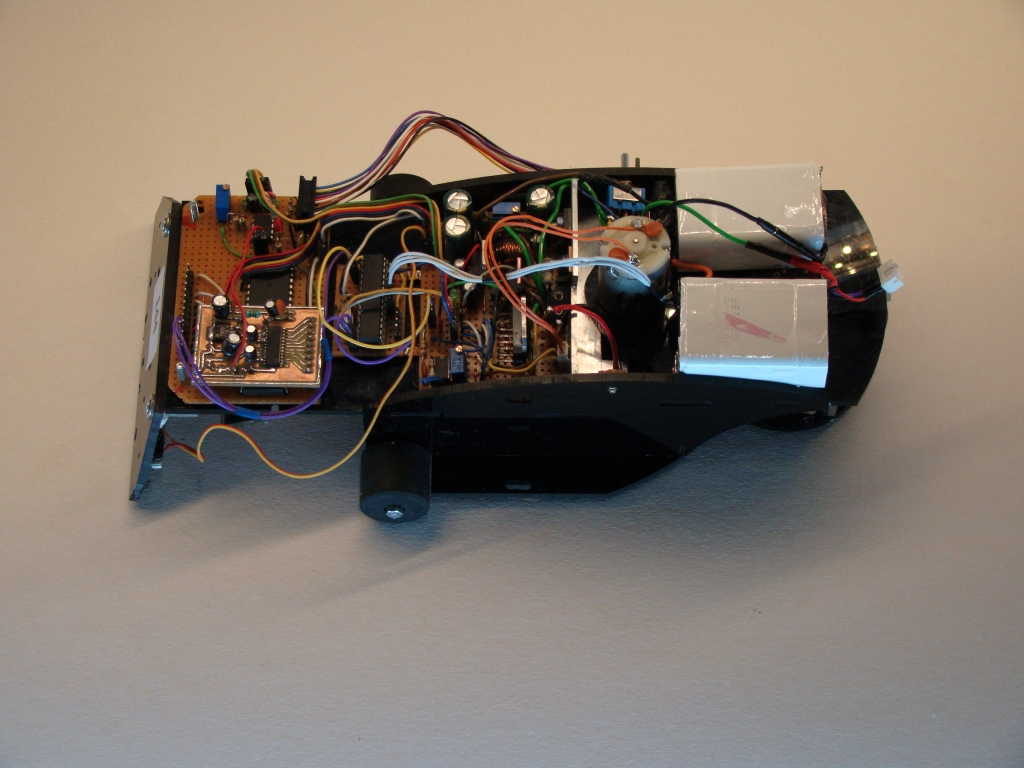
This device is powered by the Li-Ion 7,4V. The battery is converted to: 5V by an LDO stabilizer, 12V for the matrix by MC34063.
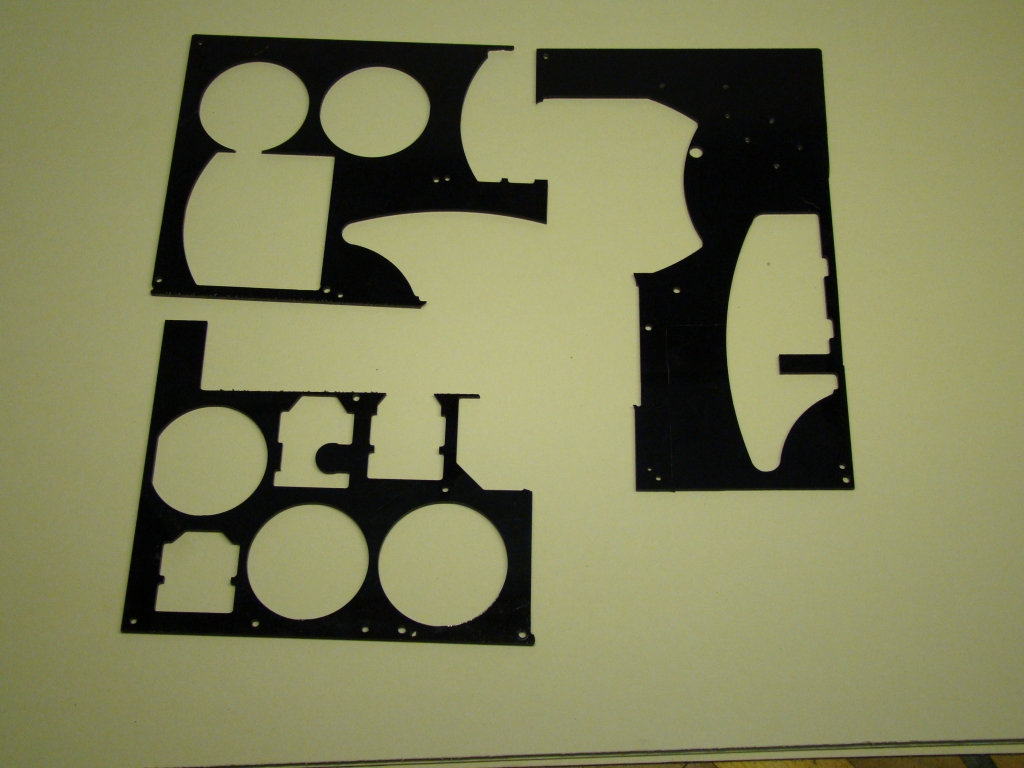
Construction
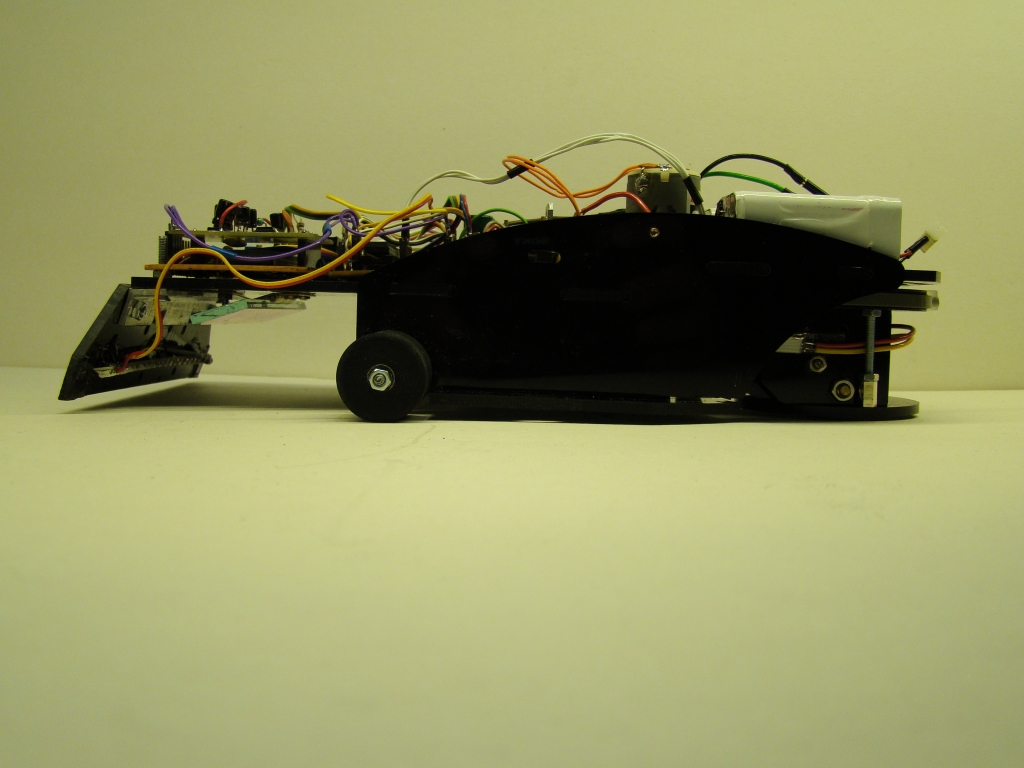
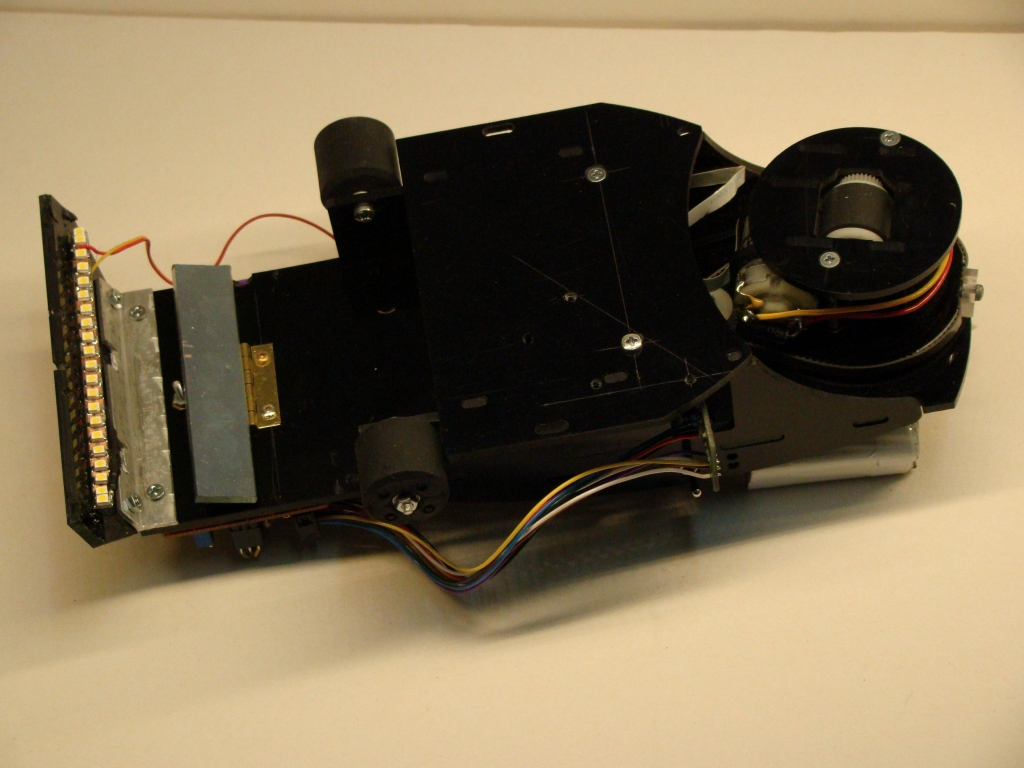
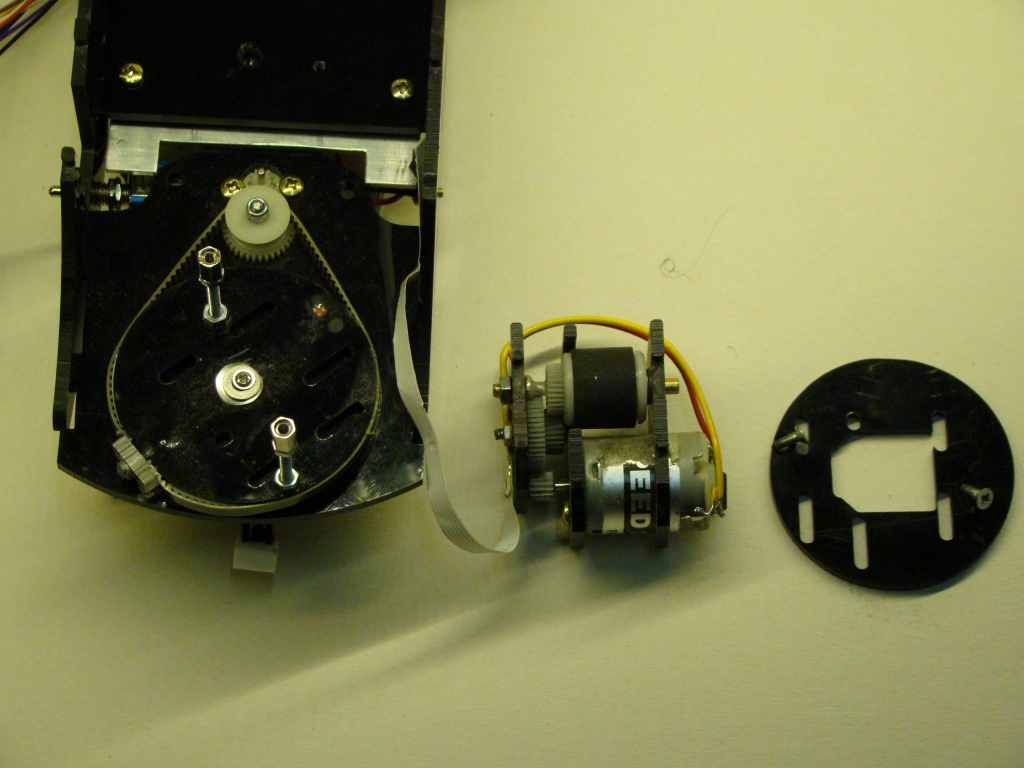
The robot is programmed in CAD. It is made of 3mm plexi cut on a CNC. Although the back torsion wheel drive seems to be good as for a lonefollower, at speed of >0,7m/s, the mechine is unstable. The whole electronics is made of universal plates, because of their casualty and possibility to change some elements of the circuit. The device is driven by the speed 280 model engine. The engine is excellent for this purpose. Acceleration is satisfying and the max speed is over 1,5m/s. The same model of engine is useful when turning. The stepper engine isn't good solution because od its low speed. The surface should be lighten by LEDs. Light is reflected in a mirror and goes by the len into the matrix positioned in the back side of the robot.
The whole device weights about 600g.


Link to original thread - Armadilo-linefolower inny niż wszystkie