aburdo
Newbie

Hi all,
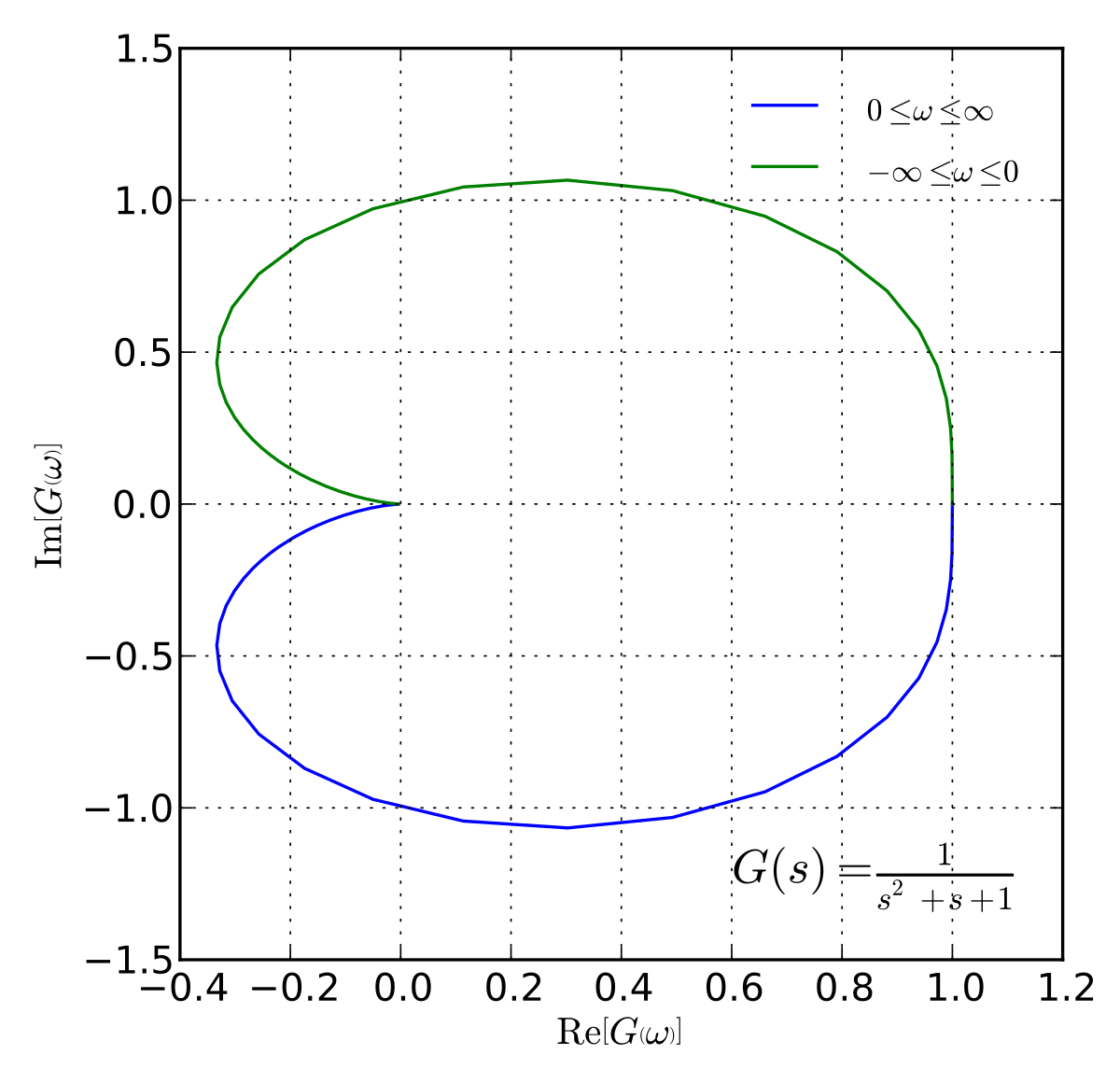
I am wondering how to know if a loop is stable in the case attached. (Loop gain is attached).
As I understand, if I get to a phase of 0 (or 360) with a gain of greater than 1, then the loop won't be stable.
So if I am correct, the example should be unstable, but I just can't make it oscillate.
1. I tried to make the loop oscillate by putting a voltage pulse with different amplitudes and different widths on the loop itself.
2. I tried to push(pull) a current pulse to(from) a high impedance node with different amplitudes and widths.
Nothing makes it oscillate.
Another note: I also want to make a model from this, so I need to get a transfer function out of this PWL.
Any idea how to do so? I tried to use matlab's identification tools box. I am able to get a "model output" (button in the GUI of the tool) with a fit of 99.9%, but if I look at the "frequency response" button, the graph I get is completely different and exporting the transfer function also fit the "frequency response" and not the "model output".
Any idea of what am I doing wrong?
Or any other suggestion of how to get a transfer function out of the graph below?
Thanks a lot everyone
I am wondering how to know if a loop is stable in the case attached. (Loop gain is attached).
As I understand, if I get to a phase of 0 (or 360) with a gain of greater than 1, then the loop won't be stable.
So if I am correct, the example should be unstable, but I just can't make it oscillate.
1. I tried to make the loop oscillate by putting a voltage pulse with different amplitudes and different widths on the loop itself.
2. I tried to push(pull) a current pulse to(from) a high impedance node with different amplitudes and widths.
Nothing makes it oscillate.
Another note: I also want to make a model from this, so I need to get a transfer function out of this PWL.
Any idea how to do so? I tried to use matlab's identification tools box. I am able to get a "model output" (button in the GUI of the tool) with a fit of 99.9%, but if I look at the "frequency response" button, the graph I get is completely different and exporting the transfer function also fit the "frequency response" and not the "model output".
Any idea of what am I doing wrong?
Or any other suggestion of how to get a transfer function out of the graph below?
Thanks a lot everyone