gonzalezteins
Newbie level 3

Dear all,
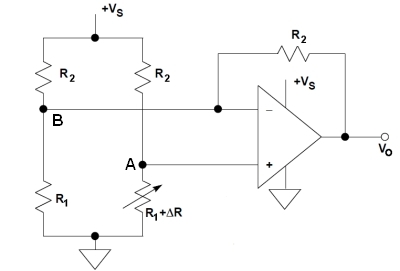
I am working ona project where i sense temp using PT-100, voltage comparator conditions the voltage to be between cmos limits. Following this adc 0804 converts A to D, and feeds to the micro-controller. the following is the cade, working fine! but i cannot understand a particular part:
---------- Post added at 18:07 ---------- Previous post was at 18:06 ----------
it is kinda urgent, will be immensely grateful to you for your help") thanks!
thanks!
---------- Post added at 18:14 ---------- Previous post was at 18:07 ----------
Rt = R0 * (1 + A* t )
A = 3.9083 X 10 ^-3

r5, r8, r6 are 2700Ω and r7 is 100Ω
I am working ona project where i sense temp using PT-100, voltage comparator conditions the voltage to be between cmos limits. Following this adc 0804 converts A to D, and feeds to the micro-controller. the following is the cade, working fine! but i cannot understand a particular part:
Code C - [expand]
---------- Post added at 18:07 ---------- Previous post was at 18:06 ----------
it is kinda urgent, will be immensely grateful to you for your help
thanks!---------- Post added at 18:14 ---------- Previous post was at 18:07 ----------
Rt = R0 * (1 + A* t )
A = 3.9083 X 10 ^-3
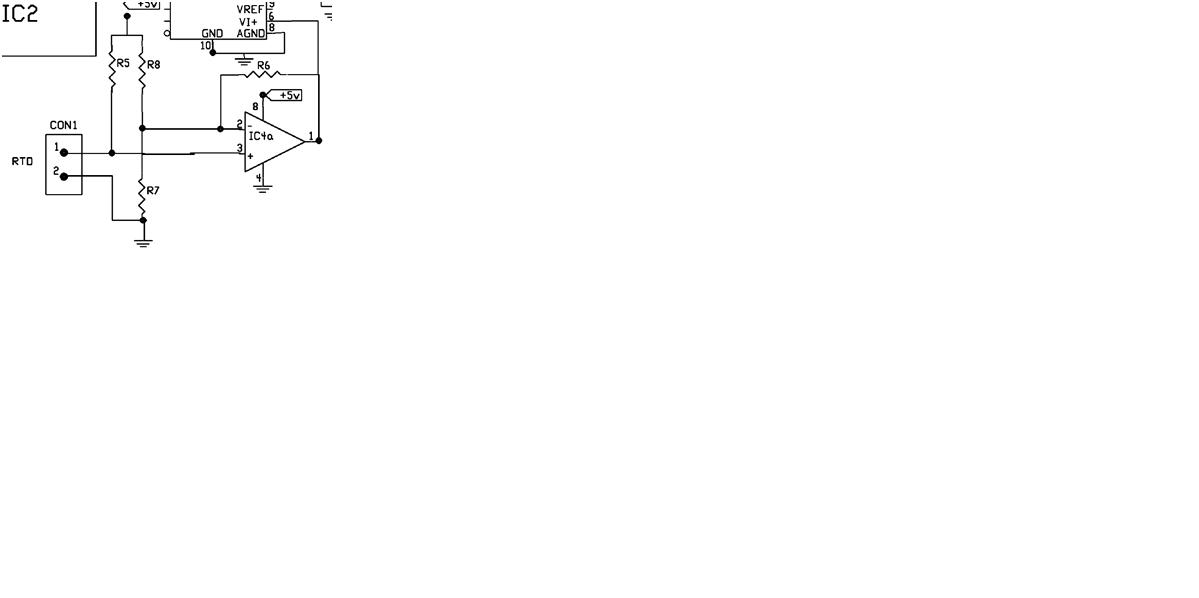
r5, r8, r6 are 2700Ω and r7 is 100Ω