Neyolight
Full Member level 5

HI ALL
Well I am using PIC 18F4620 and coding in MC18. I want to do something and I have a clear idea about it but unsure how to code that in C. Could you guys please have a look at what I want to do and convert that to C code please.
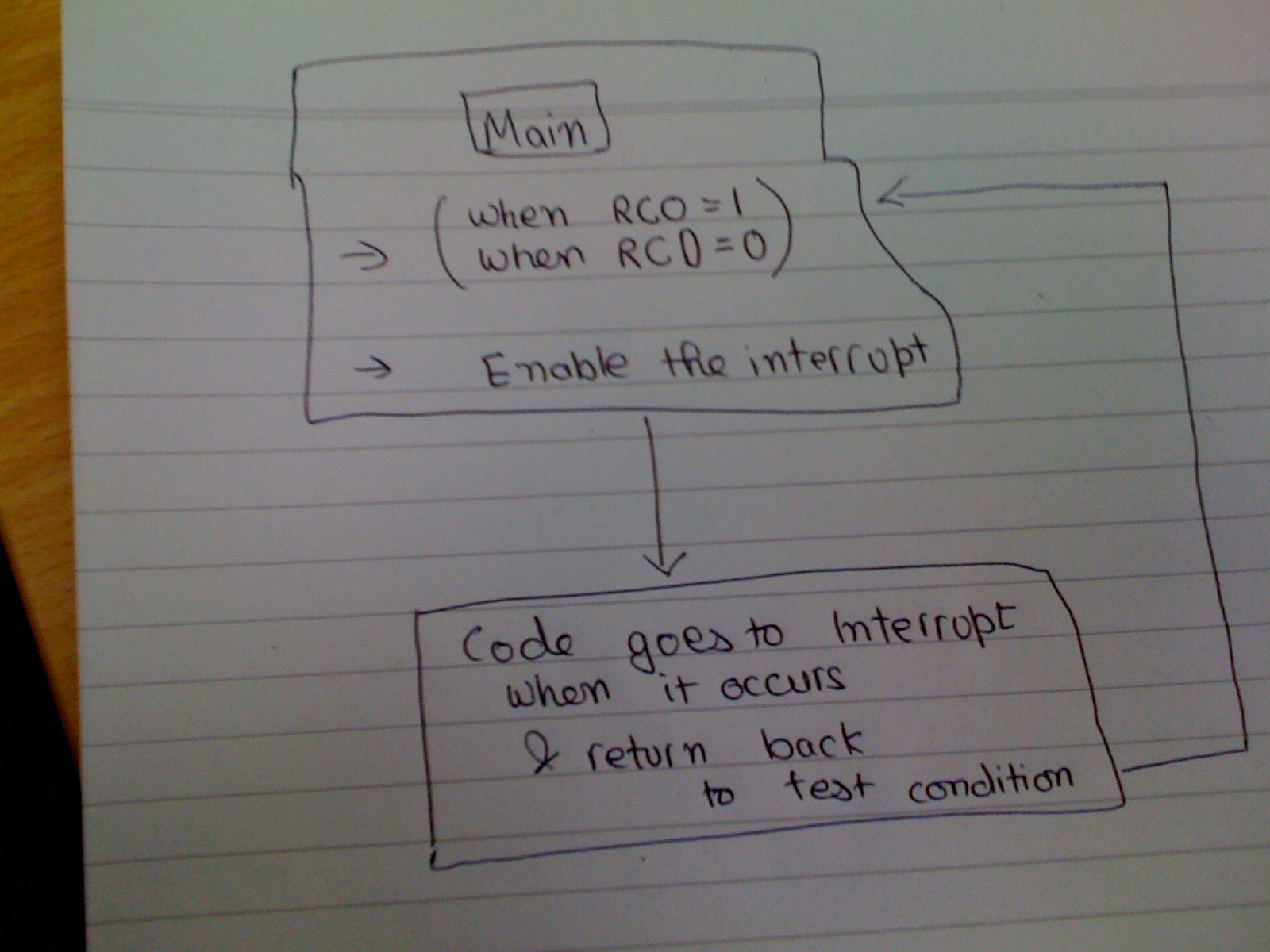
So, I am using interrupts. I have a test condition in the main loop. Before entering the interrupt the code must check weather the test condition has reached. If yes, the code go to interrupt if interrupt occurs. If not, it stays there till the test condition has been met.
Now once the code go to an interrupt routine, it does what its suppose to and RETURN back to the TEST in the main loop for another trial. I have an image attached of what I want to do.

Well I am using PIC 18F4620 and coding in MC18. I want to do something and I have a clear idea about it but unsure how to code that in C. Could you guys please have a look at what I want to do and convert that to C code please.
So, I am using interrupts. I have a test condition in the main loop. Before entering the interrupt the code must check weather the test condition has reached. If yes, the code go to interrupt if interrupt occurs. If not, it stays there till the test condition has been met.
Now once the code go to an interrupt routine, it does what its suppose to and RETURN back to the TEST in the main loop for another trial. I have an image attached of what I want to do.