Hi,
Here I am introducing an MMC digital voice recorder made using a PIC16F877A.. I got many help from many of the forum members while doing this project. Thanks to all.. I have updated the complete details in my blog vinodstanur.blogspot.com/2011/07/attempt-to-access-memory-card-mmc-using.html...
working video:
[video]www.youtube.com/watch?v=Mn1VsM-i8QI[/video]
Below is my final working MMC initialization function:
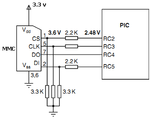
CIRCUIT DIAGRAM:

SOURCE CODE:
Here I am introducing an MMC digital voice recorder made using a PIC16F877A.. I got many help from many of the forum members while doing this project. Thanks to all.. I have updated the complete details in my blog vinodstanur.blogspot.com/2011/07/attempt-to-access-memory-card-mmc-using.html...
working video:
[video]www.youtube.com/watch?v=Mn1VsM-i8QI[/video]
Below is my final working MMC initialization function:
Code:
void mmc_init()
{
CS = 1;
for (u = 0; u < 50; u++) {
spi_write(0xff);
}
CS = 0;
__delay_ms(1);
command(0, 0, 0x95);
count = 0;
while ((readdata != 1) && (count < 1000)) {
spi_read();
count++;
}
if (count >= 1000) {
string("CARD ERROR-CMD0 ");
while (1);
}
command(1, 0, 0xff);
count = 0;
while ((readdata != 0) && (count < 1000)) {
command(1, 0, 0xff);
spi_read();
count++;
}
if (count >= 1000) {
string("CARD ERROR-CMD1 ");
while (1);
}
command(16, 512, 0xff);
count = 0;
while ((readdata != 0) && (count < 1000)) {
spi_read();
count++;
}
if (count >= 1000) {
string("CARD ERROR-CMD16");
while (1);
}
string("MMC INITIALIZED!");
__delay_ms(1000);
SSPCON = SSPCON & 0b11111101;
}CIRCUIT DIAGRAM:
SOURCE CODE:
Code:
/*
------------------------------------------------------------------------------------
PIC16F877A + MMC voice recored (no file system)
------------------------------------------------------------------------------------
COMPILER: HI-TECH C , TARGET uC PIC16F877A
------------------------------------------------------------------------------------
by Vinod.S
<vinodstanur@gmail.com> [url]https://vinodstanur.blogspot.com[/url]
------------------------------------------------------------------------------------
*/
#include<pic.h>
#define _XTAL_FREQ 20e6
__CONFIG(0x3F3A);
#define CS RC2
#define RS RB2
#define EN RB1
#define fst cmd(0x80)
#define snd cmd(0xc0)
unsigned char readdata, u;
unsigned int count;
unsigned long int arg = 0;
/*-----------------LCD BEGIN------------------------------*/
void LCD_STROBE(void)
{
EN = 1;
__delay_us(0.5);
EN = 0;
}
void data(unsigned char c)
{
RS = 1;
__delay_us(40);
PORTD = (c >> 4);
LCD_STROBE();
PORTD = (c);
LCD_STROBE();
}
void cmd(unsigned char c)
{
RS = 0;
__delay_us(40);
PORTD = (c >> 4);
LCD_STROBE();
PORTD = (c);
LCD_STROBE();
}
void clear(void)
{
cmd(0x01);
__delay_ms(2);
}
void lcd_init()
{
__delay_ms(20);
cmd(0x30);
__delay_ms(1);
cmd(0x30);
__delay_ms(1);
cmd(0x30);
cmd(0x28); // Function set (4-bit interface, 2 lines, 5*7Pixels)
cmd(0x28); // Function set (4-bit interface, 2 lines, 5*7Pixels)
cmd(0x28); // Function set (4-bit interface, 2 lines, 5*7Pixels)
cmd(0x0c); // Make cursorinvisible
clear();
clear(); // Clear screen
cmd(0x6); // Set entry Mode
}
void string(const char *q)
{
clear();
while (*q) {
data(*q++);
}
}
void istring(unsigned int q)
{
cmd(0x81);
data(48 + (q / 100));
q %= 100;
data(48 + (q / 10));
q %= 10;
data(48 + (q));
__delay_ms(500);
}
/*-----------------------LCD END------------------------*/
/*-----------------------USRT BEGIN--------------------*/
void usrt_init()
{
TRISC6 = 0;
TXSTA = 0b00100110;
RCSTA = 0b11010000;
SPBRG = 10;
}
void printf(const char *p)
{
while (*p) {
TXREG = *p;
while (TRMT == 0);
p++;
}
}
void txd(unsigned char vv)
{
TXREG = vv;
while (TRMT == 0);
}
/*-----------------------USRT END-----------------------*/
/*----------------------PWM BEGINS--------------------*/
void pwm_init()
{
TRISC1 = 0;
T2CKPS1 = 0;
T2CKPS0 = 0;
PR2 = 0x50;
CCPR2L = 0x17;
TMR2ON = 1;
CCP2CON = 0b00001100;
}
void pwm_disable()
{
CCP2CON = 0b00000000;
}
void pwm_enable()
{
CCP2CON = 0b00001100;
}
/*--------------------PWM END-------------------------*/
/*-------------------MMC BEGIN-----------------------*/
void spi_init()
{
TRISC4 = 1;
RC2 = 1;
RC3 = 0;
RC5 = 0;
TRISC2 = TRISC3 = TRISC5 = 0;
SSPCON = 0b00100010;
SSPEN = 1;
SMP = 1;
CKE = 1;
CKP = 0;
}
void spi_write(unsigned char kk)
{
SSPBUF = kk;
while (BF == 0);
}
void spi_read()
{
SSPBUF = 0xff;
while (BF == 0);
readdata = SSPBUF;
}
void command(char command, unsigned long int fourbyte_arg, char CRCbits)
{
spi_write(0xff);
spi_write(0b01000000 | command);
spi_write((unsigned char) (fourbyte_arg >> 24));
spi_write((unsigned char) (fourbyte_arg >> 16));
spi_write((unsigned char) (fourbyte_arg >> 8));
spi_write((unsigned char) fourbyte_arg);
spi_write(CRCbits);
spi_read();
}
void mmc_init()
{
CS = 1;
for (u = 0; u < 50; u++) {
spi_write(0xff);
}
CS = 0;
__delay_ms(1);
command(0, 0, 0x95);
count = 0;
while ((readdata != 1) && (count < 1000)) {
spi_read();
count++;
}
if (count >= 1000) {
string("CARD ERROR-CMD0 ");
while (1);
}
command(1, 0, 0xff);
count = 0;
while ((readdata != 0) && (count < 1000)) {
command(1, 0, 0xff);
spi_read();
count++;
}
if (count >= 1000) {
string("CARD ERROR-CMD1 ");
while (1);
}
command(16, 512, 0xff);
count = 0;
while ((readdata != 0) && (count < 1000)) {
spi_read();
count++;
}
if (count >= 1000) {
string("CARD ERROR-CMD16");
while (1);
}
string("MMC INITIALIZED!");
__delay_ms(1000);
SSPCON = SSPCON & 0b11111101;
}
void write()
{
pwm_disable();
command(25, arg, 0xff);
while (readdata != 0) {
spi_read();
string("WRITE ERROR");
}
string("WRITING MMC");
while (1) {
spi_write(0xff);
spi_write(0xff);
spi_write(0b11111100);
for (int g = 0; g < 512; g++) {
GO = 1;
while (GO);
spi_write(ADRESL);
PORTD = ~ADRESL;
}
spi_write(0xff);
spi_write(0xff);
spi_read();
while ((readdata & 0b00011111) != 0x05) {
spi_read();
}
while (readdata != 0xff) {
spi_read();
}
if (RE0 == 1) {
spi_write(0xff);
spi_write(0xff);
spi_write(0b11111101); //stop token
spi_read();
spi_read();
while (readdata != 0xff) {
spi_read();
}
break;
}
}
}
void read()
{
pwm_enable();
command(18, (arg), 0xff);
while (readdata != 0) {
spi_read();
string("READ ERROR");
}
string("READING MMC");
while (1) {
while (readdata != 0xfe) {
spi_read();
}
for (int g = 0; g < 512; g++) {
spi_read();
__delay_us(16.5);
CCPR2L = readdata;
PORTD = ~readdata;
}
spi_write(0xff);
spi_write(0xff);
if (RE0 == 1) {
command(12, arg, 0xff);
spi_read();
while (readdata != 0) {
spi_read();
}
while (readdata != 0xff) {
spi_read();
}
break;
}
}
}
/*--------------------mmc end----------------------*/
/*-----------------ADC functions-------------------*/
void adc_init()
{
TRISA0 = 1;
ADCON0 = 0b10000001;
ADCON1 = 0b10001110;
}
/*-------------------main function-------------------*/
main()
{
CS = 1;
PORTD = 0;
TRISC4 = 0;
TRISC5 = 0;
TRISD = 0;
TRISB2 = 0;
TRISB1 = 0;
TRISE0 = 1;
lcd_init();
adc_init();
usrt_init();
spi_init();
mmc_init();
pwm_init();
lcd_init();
count = 0;
CS = 0;
arg = 0;
while (1) {
arg = 0;
fst;
pwm_enable();
string("READ MODE");
__delay_ms(1000);
read();
arg = 0;
fst;
pwm_disable();
string("WRITE MODE");
__delay_ms(1000);
write();
}
}
}