Jestin_cubetech
Advanced Member level 1

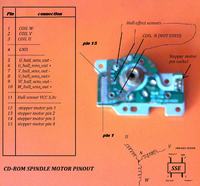
Hall Sensor Based BLDC Motor driving using microcontroller.

Code:
#include <pic.h> //BLDC DRIVER delta connection and hall sensor
#define _XTAL_FREQ 20000000
unsigned char n=0,hall_sens=0,k=0;
bit DIR;
const unsigned char commutation[12][2]=
{
//---------------forward----------
0x80,0x24,//10.01.00 0x31,//
0xa0,0x06,//00.01.10 0x1F,//
0x20,0x12,//01.00.10 0X07,//
0x60,0x18,//01.10.00 0X0D,//
0x40,0x09,//00.10.01 0X1C,//
0xc0,0x21,//10.00.01 0X34,//
//---------------Reverse---------
0x80,0x18,//0X0D,//
0xc0,0x12,//0X07,//
0x40,0x06,//0X1F,//
0x60,0x24,//0X31,//
0x20,0x21,//0X34,//
0xa0,0x09,//0X1C,//
};
void motor_startup()
{
RBIE=0;GIE=0;
PORTD=0x24;
__delay_ms(10);
PORTD=0x06;
__delay_ms(10);
PORTD=0x12;
__delay_ms(10);
PORTD=0x18;
__delay_ms(10);
PORTD=0x09;
__delay_ms(10);
PORTD=0x21;
__delay_ms(10);
RBIE=1;GIE=1;
}
////////////////////////////////////////
void motor_stop()
{
PORTD=0;
RBIE=0; RBIF=0;GIE=0;
PORTD=0;
__delay_ms(10);
RBIE=0; RBIF=0;GIE=0;
PORTD=0;
}
void interrupt isr()
{
if(RBIF)
{
RBIF=0;
hall_sens=(PORTB&0Xe0); // HALL EFFECT SENSOR READING
if(DIR) //FWD
{
for(n=0;n<5;n++)
{
if(hall_sens==commutation[n][0]){k=n;}
}
}
else //BWD
{
for(n=5;n<11;n++)
{
if(hall_sens==commutation[n][0]){k=n;}
}
}
PORTD=(commutation[k][1]&0X3F);
}
}
////////////////////////////////////////
void main()
{
TRISD=0x0;PORTD=0;TRISB=0xF0;
TRISA=0x01; ADCON1=0x80; LED=1;
RBIE=0;RBIF=0;
PEIE=1;GIE=1;
motor_startup();
while(1);
}