kanonka
Member level 1

I know this question was beat up to death ") , but stay with me for a second.
, but stay with me for a second.
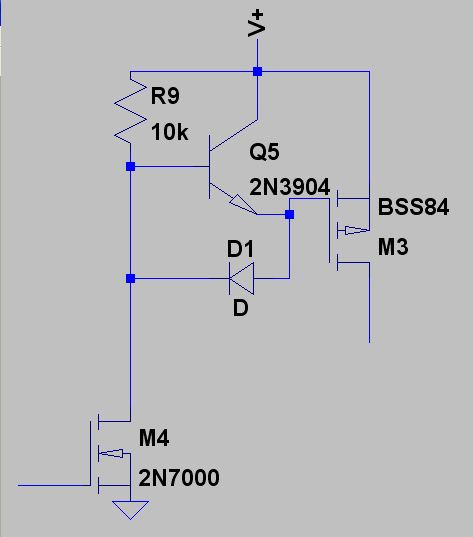
In short, I needed +/- 5V and +/-10V (well, can go as low as 8) rails coming from a 3.7V battery with the highest efficiency possible. The big caveat - power supply cannot have any inductors in it (well, at least no more than 10-20 nanoH) due to low-field sensing magnetic sensors right next to it. So I looked at the charge pumps. None currently on a market suited me because for the battery full life voltage range (2.8V .. 4.25V from charge to discharge) they had efficiency after LDO less than 50%. Making long story short, I managed to come up with an idea (already successfully simulated it in LTSpice) that solves the task with an average efficiency of 91% (I expect real life numbers to be around 86-88%). But here comes a big BUT. The application is portable, so I'm VERY limited in space - all in all I have about 400-450 sq. mm for the pump charge alone. Problem is, it has about 30 MOSFETs, 20 of them being high-side, that I need somehow to drive. The time I need to turn one mosfet on or off is limited by 5microsec - can't have any longer as caps are getting too big to fit my limited space. First I started off with N-FETs, but existing drivers either require way more than my minimum of 2.8V, or are very slow (like LTC1982 - 110us to switch!). Also, using monolitic charge pump to drive my own charge pump looks like a stupid idea, so I looked at the option to use P-FETs on a high side. Situation became better here, but not by much. I still can't find reasonably-sized P-FET driver (2x2mm or less) working from minimum 2.8V. Also, source of half P-FETs 50% of the time is taken much higher than V+ rail, so the only option I have left is a well-known discrete driver (you know, one low-power N-FET + 3 resistors). The problem I have with this approach is that it is a discrete (3 resistors * 20 P-FETs = 60!!! It will take years to put them onto PCB while soldering ), and also I don't know how to discharge gate fast (I suspect, it will require even more components).
So, finally, here is a question: does anyone know a monolitic high-side P-FET driver that:
1) can run from as low as 2.8V and
2) connects to gate AND source of the P-FET to allow source be above the rail (ANY rail in the system - this is important) - something like IRS2112 and
3) be small enough (preferably 2x2mm or less; max I can have is 3x3mm, but even that is too much; unless it incorporates 2 or more channels) and
4) require no or bare minimum external components.
I searched high and low for couple weeks now and can't find one. Any advice? Or may be I should totally change a design of the power supply?
, but stay with me for a second.In short, I needed +/- 5V and +/-10V (well, can go as low as 8) rails coming from a 3.7V battery with the highest efficiency possible. The big caveat - power supply cannot have any inductors in it (well, at least no more than 10-20 nanoH) due to low-field sensing magnetic sensors right next to it. So I looked at the charge pumps. None currently on a market suited me because for the battery full life voltage range (2.8V .. 4.25V from charge to discharge) they had efficiency after LDO less than 50%. Making long story short, I managed to come up with an idea (already successfully simulated it in LTSpice) that solves the task with an average efficiency of 91% (I expect real life numbers to be around 86-88%). But here comes a big BUT. The application is portable, so I'm VERY limited in space - all in all I have about 400-450 sq. mm for the pump charge alone. Problem is, it has about 30 MOSFETs, 20 of them being high-side, that I need somehow to drive. The time I need to turn one mosfet on or off is limited by 5microsec - can't have any longer as caps are getting too big to fit my limited space. First I started off with N-FETs, but existing drivers either require way more than my minimum of 2.8V, or are very slow (like LTC1982 - 110us to switch!). Also, using monolitic charge pump to drive my own charge pump looks like a stupid idea
, so I looked at the option to use P-FETs on a high side. Situation became better here, but not by much. I still can't find reasonably-sized P-FET driver (2x2mm or less) working from minimum 2.8V. Also, source of half P-FETs 50% of the time is taken much higher than V+ rail, so the only option I have left is a well-known discrete driver (you know, one low-power N-FET + 3 resistors). The problem I have with this approach is that it is a discrete (3 resistors * 20 P-FETs = 60!!! It will take years to put them onto PCB while soldering ), and also I don't know how to discharge gate fast (I suspect, it will require even more components). So, finally, here is a question: does anyone know a monolitic high-side P-FET driver that:
1) can run from as low as 2.8V and
2) connects to gate AND source of the P-FET to allow source be above the rail (ANY rail in the system - this is important) - something like IRS2112 and
3) be small enough (preferably 2x2mm or less; max I can have is 3x3mm, but even that is too much; unless it incorporates 2 or more channels) and
4) require no or bare minimum external components.
I searched high and low for couple weeks now and can't find one. Any advice? Or may be I should totally change a design of the power supply?